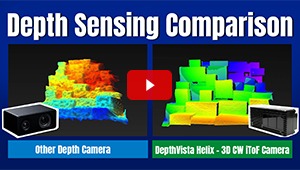
Die DepthVista-Serie von e-con Systems umfasst eine Reihe von 3D-Kameras, die mit Time-of-Flight-Technologie arbeiten. Diese Kameras arbeiten im NIR-Bereich (940nm/850nm) und liefern genaue 3D-Bilder in Innen- und Auβenbereichen.
Die DepthVista ToF-Serie von e-con kann eine End-to-End-Tiefenverarbeitung auf den Kameras durchführen und so direkt 2D- und 3D-Daten in Echtzeit erzeugen.
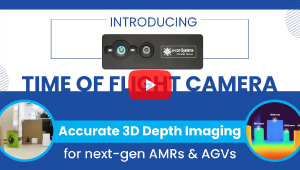
Die genaue und präzise 3D-Bildgebung macht unsere Kameraserie zu einer perfekten Lösung für 3D-Vision-Anwendungen wie autonome mobile Roboter, autonome Traktoren, Patientenpflege und -überwachung, 3D-basierte Gesichtserkennung usw.
Diese ToF-Kameraserie verfügt über drei Schnittstellen - USB, MIPI und GMSL2. Wir bieten auch Treiber- und SDK-Unterstützung für NVIDIA Jetson AGX ORIN/AGX Xavier und X86-basierte Plattformen.

 depth camera")
 depth camera")


Perfekt für den Auβen- und Innenbereich

USB, MIPI & GMSL
Einfache Integration in alle Roboterplattformen
| Produktname | Wellenlänge | Geeignet für | Auflösung | Bildfrequenz | Ausgang | Schnittstelle | Plattformen | |
|---|---|---|---|---|---|---|---|---|
| DepthVista_Helix_GMSL_IRD |
940 nm | Innen- und Auβenbereich | 1280 x 960 px | 30 Bilder/S | IR & Tiefe | GMSL2 | NVIDIA AGX ORIN/AGX Xavier |
USD 599
|
| DepthVista_Helix_USB_IRD |
940 nm | Innen- und Auβenbereich | 1280 x 960 px | 30 Bilder/S | IR & Tiefe | USB | X86 (PC) |
USD 599
|
| DepthVista_Helix_GMSL_IRD_ONX |
940 nm | Innen- und Auβenbereich | 1280 x 960 px | 30 Bilder/S | IR & Tiefe | GMSL2 | NVIDIA Jetson Orin NX / Nano |
 |
| DepthVista_USB_RGBIRD | 850 nm | Innenbereich | 640 x 480 px | 30 Tiefe | RGB-IR & Bilder/S | USB | X86 (PC) |
|
| DepthVista_USB_IRD | 940/850 nm | Innen- und Auβenbereich | 640 x 480 px | 30 Bilder/S | IR & Tiefe | USB | X86 (PC) |
|
| DepthVista_GMSL_IRD | 940/850 nm | Innen- und Auβenbereich | 640 x 480 px | 30 Bilder/S | IR & Tiefe | GMSL | NVIDIA Jetson AGX ORIN |
|
| DepthVista_HSB | 940 nm | Innen- und Auβenbereich | 640 x 480px | 30 Bilder/S | IR & Tiefe | 10G HSB | NVIDIA Jetson AGX Thor / Orin |
|

DepthVista liefert die Tiefendaten direkt vom Modul - dadurch werden Komplikationen wie die Ausführung von Algorithmen zur Tiefenanpassung auf der Host-Plattform vermieden.

Betriebsarten - Nahmodus: 0,2m bis 1,2m, Fern-Modus: 1m bis 6m

* Bei benutzerdefinierter Anpassung kann der Tiefenbereich auf bis zu 8.5m skaliert werden (standardmäβig 6 m).

DepthVista besticht durch seine Kompaktheit, die darauf zurückzuführen ist, dass der Sensor und die Beleuchtung zusammen platziert werden können.
Eine proprietäre Technik ermöglicht den Betrieb mehrerer ToF-Kameras ohne gegenseitige Beeinflussung. Diese Funktion ist mit benutzerdefinierter Anpassung verfügbar.








")


















