


AIを活用した組み込みアプリケーションでは、高解像度かつ電力効率に優れたカメラが求められます。e-con製の既存カメラをNVIDIA JetPack™ 6.2にアップグレードすることで、これらの要件を満たし、全体的なパフォーマンスを向上させる強力なソリューションを実現できます。本記事では、あまり経験のない方でも簡単に実施できるアップグレード手順を、分かりやすく解説します。
AIを用いた組み込みアプリケーションは、マルチタスク処理や高度なソフトウェア機能を必要とするため、カメラシステムに負荷がかかり、パワーマネージメントの複雑化や応答性の低下を招く場合があります。しかし、Jetson Orin Nano™ および Jetson Orin™ NX SoM 向けの JetPack 6.2 に含まれる新機能により、これらの課題を効果的に解決し、パワーマネージメントの最適化とカメラの稼働時間の大幅な延長が可能となります。
本記事では、NVIDIA JetPack 6.2 の概要をご紹介するとともに、電力効率の向上や AI タスクの効率的な処理における主な利点について、焦点を当ててご説明いたします。
NVIDIA JetPack 6.2 の新機能とは
JetPack 6.2 では、Jetson Orin Nano および Jetson Orin NX SoM に対応した新機能「スーパーモード」が導入されました。このアップデートにより、Jetson Orin Nano™ SoM および NX SoM において、25W モードや最大限のパフォーマンスを発揮する「MAXN SUPER モード」という新たな電力モードが使用可能になります。
JetPack 6.2 の主なメリット
Jetson Orin Nano および Jetson Orin NX SoM において、JetPack 6.2 の新しい電力モードを活用することで、以下のようなメリットが得られます。
- 高度なパワーマネージメント: 拡張された電力モードにより、カメラは使用状況に応じて電力消費を柔軟に調整できるようになります。これにより、全体の電力消費が抑えられ、マルチタスク処理が求められるAI組み込みアプリケーションにおいても、より効率的な動作が可能となります。
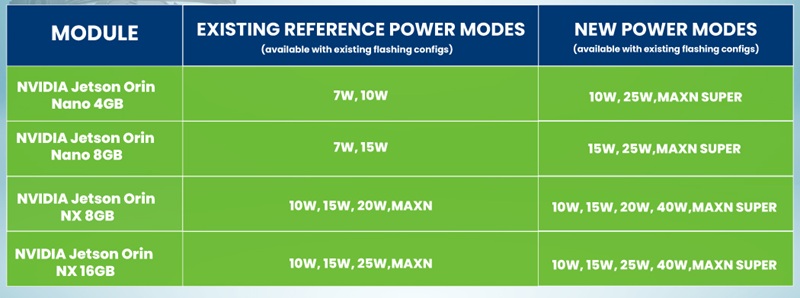
図 1: Jetson Orin Nano および Jetson Orin NX SoM の新しい基準電力モード (出典 – NVIDIA)
- 高フレーム レート処理の向上: 既存の SoM の帯域幅と AI コンピューティングの向上により、カメラは高速 AI アプリケーションに不可欠な 1 秒あたりのフレーム処理能力が向上します。
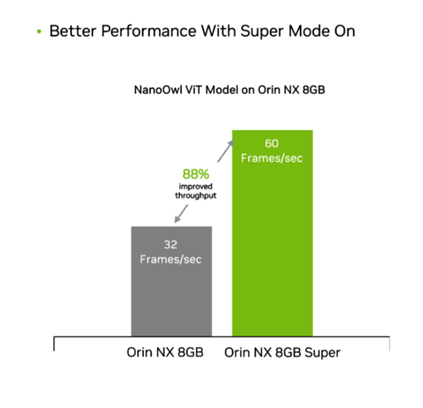
図2: スーパーモードによるOrin NX 8GBのフレームレートの向上 (出典 – NVIDIA)
- 推論時間の短縮: スーパー・モードを利用することで、複雑なシーンデータの高速処理が可能となり、推論の遅延が大幅に短縮され、リアルタイムAIのパフォーマンスが向上します。
以下の画像は、NVIDIA Orin™ Nanoモジュールをスーパー・モードで動作させ、 See3CAM_CU81 カメラを使用し、YOLOv8モデルによって複雑なシーン内の物体をリアルタイムで検出している様子を示しています。
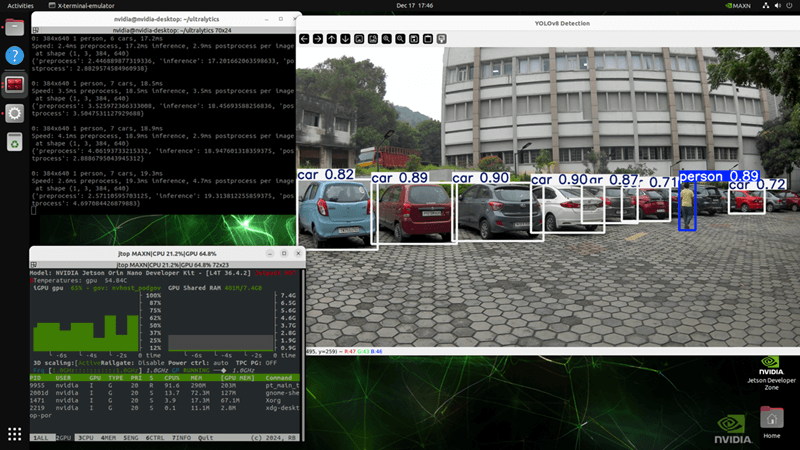 図3: リアルタイム物体検出のテスト画像
図3: リアルタイム物体検出のテスト画像
NVIDIA JetPack 6.2 のスーパー・モードに対応した e-con カメラのデモンストレーションは、ブログ記事「既存の NVIDIA® Jetson Orin™ デバイスをスーパー・モードで高速化 – e-con Systems」でご覧いただけます.
JetPack 6.2 の主な機能が把握できたところで、次に既存のカメラを JetPack 6.2 に対応させる手順を見ていきましょう。
カメラシステムをアップグレードするには?
既存のカメラ設定は、そのまま簡単に NVIDIA JetPack 6.2 にアップグレードできます。この記事では、以下の2つのアップグレードシナリオについてご紹介します。
-
JetPack 6.0 から JetPack 6.2 へのアップグレード
JetPack 6.0 から直接アップグレードする場合、または弊社ブログ カメラを NVIDIA® JetPack 6.1 にアップグレードする方法とそれが重要な理由を参考に、JetPack 6.0 から JetPack 6.1 にアップグレード済みの場合は、JetPack 6.0 から JetPack 6.2 へのアップグレード の手順に従ってください。
-
JetPack 6.1 から JetPack 6.2 へのアップグレード
以下の製品に対して JetPack をアップグレードする場合は JetPack 6.1 から JetPack 6.2 へのアップグレード の手順に従ってください。
Jetpack 6.0 から Jetpack 6.2 へのアップグレード
ステップ 1. 環境の設定
まず、バイナリをビルドするために必要な環境変数を設定します。
この記事のコマンドと出力メッセージは、わかりやすいように以下の表のように色分けされています。
| 色 | 表記 |
| 青 | 開発用(Linux)PCで実行されるコマンド |
| 赤 | Jetsonボードで実行されるコマンド |
| 緑 | Jetsonボードの出力メッセージ |
| 紫 | パッチファイルソースを手動で追加 |
表1: 色表記
注: 環境を設定するには、e-con の Developer Resources から”Developer Guide”マニュアルをダウンロードし、”Developer Guide” マニュアルの Setting Up Environment セクションに記載されているビルド コマンドに従ってください。.
ステップ 2:必要なファイルのダウンロード
環境の設定が完了したら、以下の表にあるリンクを使用して、Linux ベースのシステムに必要なファイルをダウンロードし、JetPack 6.2 へのアップグレードを行ってください。
| 前提条件 | ダウンロードリンク |
| Bootlinツールチェーン | Bootlin Toolchain Sources, 2020.08-1 |
| L4T Jetson AGX Orin™、Orin Nano™、Orin NX ドライバー パッケージ | Driver Package (BSP) |
| L4T Jetson AGX Orin™、Orin Nano™、Orin NX サンプル Rootfs | Sample Root Filesystem |
| ドライバーパッケージソース | Driver Package (BSP) Sources |
| e-con製品のJetPack 6.0リリースパッケージ | ログイン認証情報を使用して、e-con のDeveloper Resources Webサイトからダウンロードします。. |
表2:前提条件
※ご注意 ”Developer Guide”に記載されているダウンロードリンクは使用しないでください。
e-con製品のリリースパッケージをダウンロードするには、” Release Notes”または”FTP Deliverables”をご参照いただき、下記パッケージにアクセスするためのログイン認証情報を取得してください。
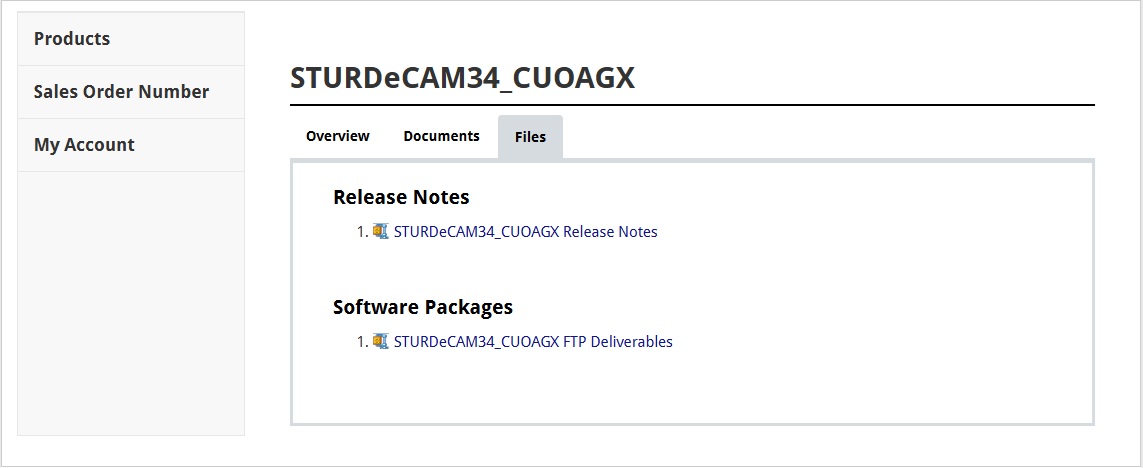
図4:カメラ製品パッケージのログイン認証情報について
”Release Notes”のドキュメントには、パッケージへアクセスするためのログイン認証情報が記載されています。認証情報を入力すると、下の参考画像のようにカメラ製品のパッケージ内容が表示されます。
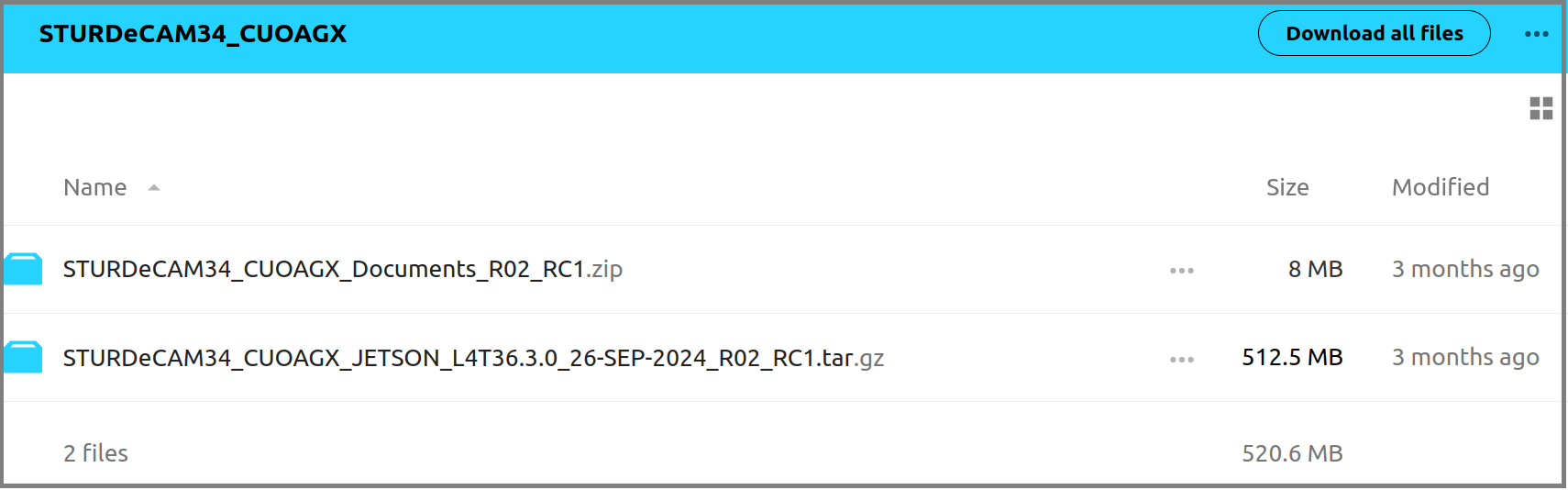
図5:カメラ製品のドキュメントとパッケージの内容
ステップ3:L4T の展開と準備
NVIDIA®のソースファイルおよび e-con Systems® のリリースパッケージをダウンロードしたら、Linuxベースのシステム上でこれらを解凍し、開発者ガイドマニュアルに従ってバイナリをビルドする必要があります。なお、使用するビルドコマンドは JetPack 6.0 用のものですので、コマンドを実行する際には、JetPack 6.2 のファイル名を JetPack 6.0 または 6.1 のファイル名に置き換えてください。JetPack 6.2 に対応する正しいファイル名は、以下の表をご参照ください。
| NVIDIA パッケージ | JetPack 6.0 | JetPack 6.1 | JetPack 6.2 |
| BootlinToolチェーン | aarch64–glibc–stable-2022.08-1.tar.bz2 | aarch64–glibc–stable-2022.08-1.tar.bz2 | aarch64–glibc–stable-2022.08-1.tar.bz2 |
| L4T Jetson AGX Orin™、Orin Nano™、Orin NX ドライバー パッケージ | Jetson_Linux_R36.3.0_aarch64.tbz2 | Jetson_Linux_R36.4.0_aarch64.tbz2 | Jetson_Linux_R36.4.3_aarch64.tbz2 |
| L4T Jetson AGX Orin™、Orin Nano™、Orin NX サンプル Rootfs | Tegra_Linux_Sample-Root- Filesystem_R36.3.0_aarch64.tbz2 | Tegra_Linux_Sample-Root- Filesystem_R36.4.0_aarch64.tbz2 | Tegra_Linux_Sample-Root- Filesystem_R36.4.3_aarch64.tbz2 |
| ドライバーパッケージソース | public_sources.tbz2 | public_sources.tbz2 | public_sources.tbz2 |
表3:JetPack 6.0、6.1、6.2 のファイル名一覧
ステップ4:リリースパッケージの展開
NVIDIA のパッケージを解凍した後は、e-con のリリースパッケージも解凍してください。
解凍された e-con パッケージの内容は、以下の参考画像で確認できます。
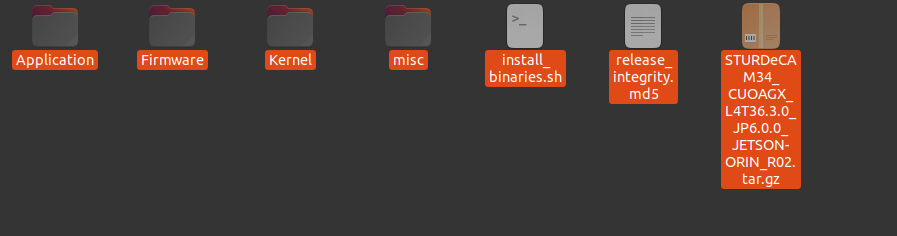
図6:e-con のリリースパッケージファイル
NVIDIA と e-con Systems® の各パッケージファイルを同一のディレクトリにまとめたら、使用するカメラハードウェアに対応するようにカーネルを構成する必要があります。
ステップ5:カーネルのダウンロードと設定
必要なファイルのダウンロードが完了したら、e-con の JetPack 6.0 リリースパッケージに含まれるパッチを NVIDIA JetPack 6.2 に適用し、カーネルを構成します。
※注意:
- e-con のDeveloper Resourcesから製品用”Developer Guide”マニュアルをダウンロードし、「DOWNLOADING AND CONFIGURING THE KERNEL」セクションにあるビルドコマンドの手順1~4に従ってください。
- ドライバーパッケージのソースは、上記の表2 に記載されている内容に従ってダウンロードしてください。
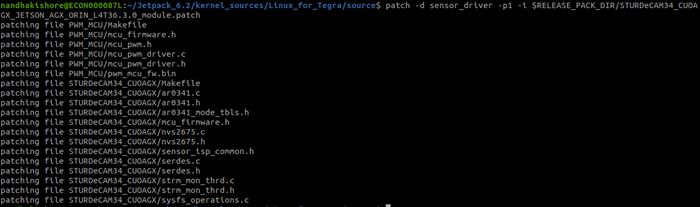

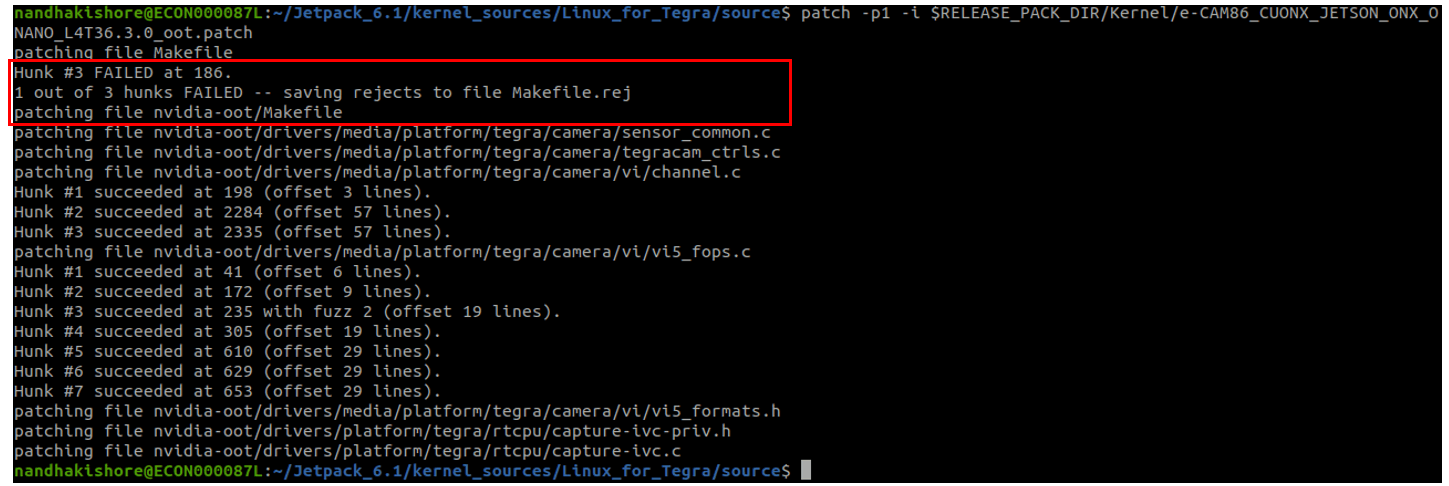
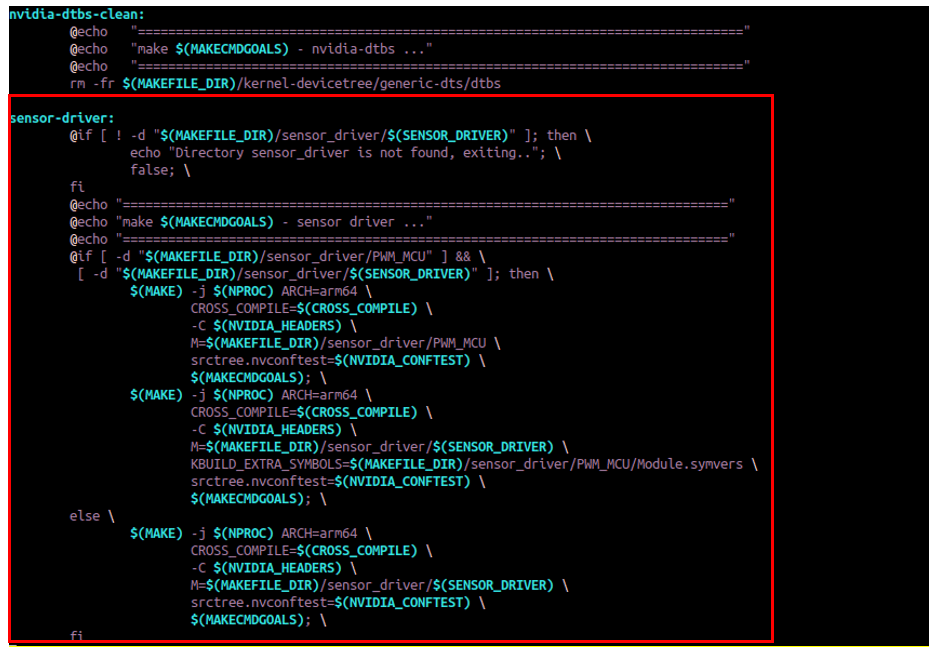 カーネルソースのMakefile
カーネルソースのMakefile

Continue reading the article by providing your company email ID
We respect your privacy. Your email will only be used for content access validation.

Prabu Kumarは、e-con Systemsの最高技術責任者兼カメラ製品責任者であり、組み込みビジョン分野で15年以上の豊富な経験があります。彼は、USBカメラ、組み込みビジョンカメラ、ビジョンアルゴリズム、FPGAに関する深い知識をも有しています。医療、工業、農業、小売、生体認証などのさまざまなドメインにまたがる50以上のカメラソリューションを構築してきました。また、デバイスドライバー開発とBSP開発の専門家でもあります。現在は、新時代のAIベースのアプリケーションを強化するスマートカメラソリューションの構築に全力を注いでいます。