


KI-Anwendungen erfordern energieeffiziente, hochauflösende Kameras mit Echtzeit-Reaktionsfähigkeit. Ein Upgrade Ihrer vorhandenen E-Con-Kamera mit NVIDIA JetPack ™ 6.2 bietet eine leistungsstarke Lösung, die ihr volles Potenzial freisetzt und die Leistung deutlich steigert. Dieser Artikel vereinfacht den Upgrade-Prozess – auch für Benutzer mit wenig Erfahrung.
Leistungsstarke KI-Anwendungen mit ihren Multitasking-Fähigkeiten und der komplexen Software belasten Kamerasysteme oft stark, was zu Problemen beim Energiemanagement und reduzierter Reaktionsfähigkeit führt. Die neue Funktion von NVIDIA Jetpack 6.2 auf dem NVIDIA Jetson Orin Nano™ und NVIDIA Jetson Orin™ NX SoM behebt diese Herausforderungen, optimiert die Stromversorgung und ermöglicht Ihrer Kamera eine deutlich längere Laufzeit.
In diesem Artikel wird NVIDIA JetPack 6.2 untersucht und die wichtigsten Vorteile des Upgrades für eine verbesserte Energieverwaltung und eine effiziente Ausführung von KI-Aufgaben hervorgehoben.
Was ist neu in NVIDIA JetPack 6.2?
NVIDIA JetPack 6.2 führte den Supermodus ein, eine bahnbrechende Funktion für das Jetson Orin Nano und Jetson Orin NX SoM. Dieses Update schaltet erweiterte Leistungsmodi frei: einen 25-W-Modus und einen unbegrenzten MAXN-SUPER-Modus für das Jetson Orin Nano™ SoM und das NX SoM.
Hauptvorteile von JetPack 6.2
Sehen wir uns die Vorteile der Verwendung neuer Energiemodi mit NVIDIA JetPack 6.2 auf dem Jetson Orin Nano und Jetson Orin NX SoM an.
- Verbessertes Energiemanagement : Erweiterte Energiemodi ermöglichen es der Kamera, den Stromverbrauch nach Bedarf anzupassen, was Multitasking-Anwendungen mit integrierter KI dynamisch zugutekommt, indem der Strombedarf reduziert wird.
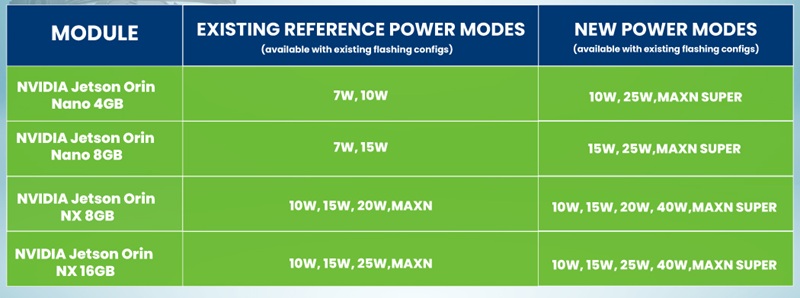
Abbildung 1: Neue Referenz-Leistungsmodi auf Jetson Orin Nano und Jetson Orin NX SoM (Quelle – NVIDIA)
- Verbesserte Verarbeitung höherer Bildraten : Die erhöhte Bandbreite und KI-Berechnung des vorhandenen SoM ermöglicht es der Kamera, mehr Bilder pro Sekunde zu verarbeiten, was für Hochgeschwindigkeits-KI-Anwendungen entscheidend ist.
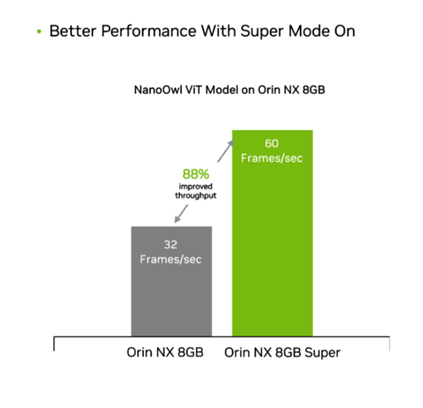
Abbildung 2: Erhöhte Bildrate auf Orin NX 8 GB mit Supermodus (Quelle – NVIDIA)
- Reduzierte Inferenzzeit: Der Supermodus ermöglicht eine schnellere Verarbeitung komplexer Szenendaten, wodurch die Inferenzlatenz reduziert und die Echtzeit-KI-Leistung verbessert wird.
Das unten gezeigte Bild zeigt den Ausgabebildschirm, der die Echtzeit-Objekterkennung mithilfe unserer See3CAM_CU81– Kamera mit dem NVIDIA Orin™ Nano-Modul im Supermodus zeigt, wobei das YOLOv8-Modell in einer komplexeren Szene ausgeführt wird.
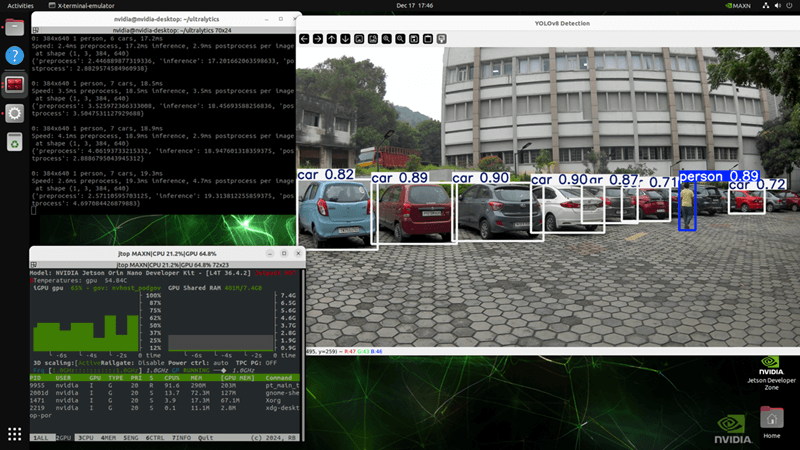 Abbildung 3: Testbild mit Echtzeit-Objekterkennung
Abbildung 3: Testbild mit Echtzeit-Objekterkennung
Um die Demonstration der e-con-Kamera mit dem Supermodus mit NVIDIA JetPack 6.2 zu sehen, schauen Sie sich unseren Blog Machen Sie Ihre vorhandenen NVIDIA® Jetson Orin™-Geräte schneller mit dem Supermodus – e-con Systems an.
Nachdem Sie nun die wichtigsten Funktionen von NVIDIA JetPack 6.2 kennen, sehen wir uns das Verfahren zum Upgrade Ihrer vorhandenen Kamera auf JetPack 6.2 an.
Welche Schritte sind zum Upgrade Ihres Kamerasystems erforderlich?
Sie können Ihr bestehendes Kamerasystem problemlos auf NVIDIA JetPack 6.2 aktualisieren. In diesem Artikel werden zwei Upgrade-Szenarien beschrieben:
-
Upgrade von Jetpack 6.0 auf Jetpack 6.2
Wenn Sie ein Upgrade von JetPack 6.0 durchführen oder die Kamera Ihres econ von NVIDIA Jetpack 6.0 auf NVIDIA Jetpack 6.1 mithilfe unseres Blogs So aktualisieren Sie Ihre Kamera auf NVIDIA® JetPack 6.1 und warum das wichtig ist?, aktualisiert haben, müssen Sie den Abschnitt Upgrade von Jetpack 6.0 auf Jetpack 6.2 befolgen..
-
Upgrade von Jetpack 6.1 auf Jetpack 6.2
Wenn Sie Jetpack für die unten aufgeführten Produkte aktualisieren, befolgen Sie den Abschnitt Aktualisieren von Jetpack 6.1 auf Jetpack 6.2.
Upgrade von Jetpack 6.0 auf Jetpack 6.2
Schritt 1. Einrichten der Umgebung
Richten Sie zunächst die erforderlichen Umgebungsvariablen zum Erstellen der Binärdateien ein.
Die Befehle und Ausgabemeldungen in diesem Artikel sind zur besseren Übersichtlichkeit farblich kodiert, wie in der folgenden Tabelle aufgeführt.
| Farbe | Notation |
| Blau | Befehle, die auf dem Entwicklungs-PC ausgeführt werden |
| Rot | Befehle, die im Jetson Board ausgeführt werden |
| Grün | Ausgabemeldungen auf dem Jetson Board |
| Lila | Manuelles Hinzufügen der Patchdateiquelle |
Tabelle 1 : Farbnotation
Hinweis: Laden Sie Ihr Produktentwicklerhandbuch aus den Entwicklerressourcen von e-con herunter und befolgen Sie die Build-Befehle im Abschnitt „Umgebung einrichten“ des Entwicklerhandbuchs zum Einrichten der Umgebung..
Schritt 2. Herunterladen der Anforderungen
Nachdem Sie die Umgebung eingerichtet haben, müssen Sie die Anforderungen mithilfe der in der folgenden Tabelle angegebenen Links auf Ihr Linux-basiertes System herunterladen, um ein Upgrade auf JetPack 6.2 durchzuführen.
| Voraussetzungen | Download-Link |
| Bootlin -Toolchain | Bootlin- Toolchain-Quellen, 2020.08-1 |
| L4T Jetson AGX Orin™, Orin Nano™, Orin NX driver Package | Driver Package (BSP) |
| L4T Jetson AGX Orin™, Orin Nano™, Orin NX sample Rootfs | Sample Root Filesystem |
| Driver Package source | Driver Package (BSP) Sources |
| JetPack 6.0-Releasepaket von e-con product | Laden Sie von der e-con-Website für Developer Resources unter Verwendung Ihrer Anmeldedaten herunter. |
Tabelle 2: Voraussetzungen
Hinweis: Sie sollten alle Download-Links im Entwicklerhandbuch ignorieren.
Um das Release-Paket des E-Con-Produkts herunterzuladen, lesen Sie bitte die Versionshinweise oder FTP-Liefergegenstände, um auf die Anmeldeinformationen für das Paket zuzugreifen, wie unten als Referenz gezeigt.
Abbildung 4: Details zu den Anmeldeinformationen für das Kamera-Produktpaket
In den Versionshinweisen finden Sie die Anmeldeinformationen für den Zugriff auf das Paket. Nach Eingabe der Anmeldeinformationen können Sie die Kameraproduktpakete als Referenzbild unten anzeigen.
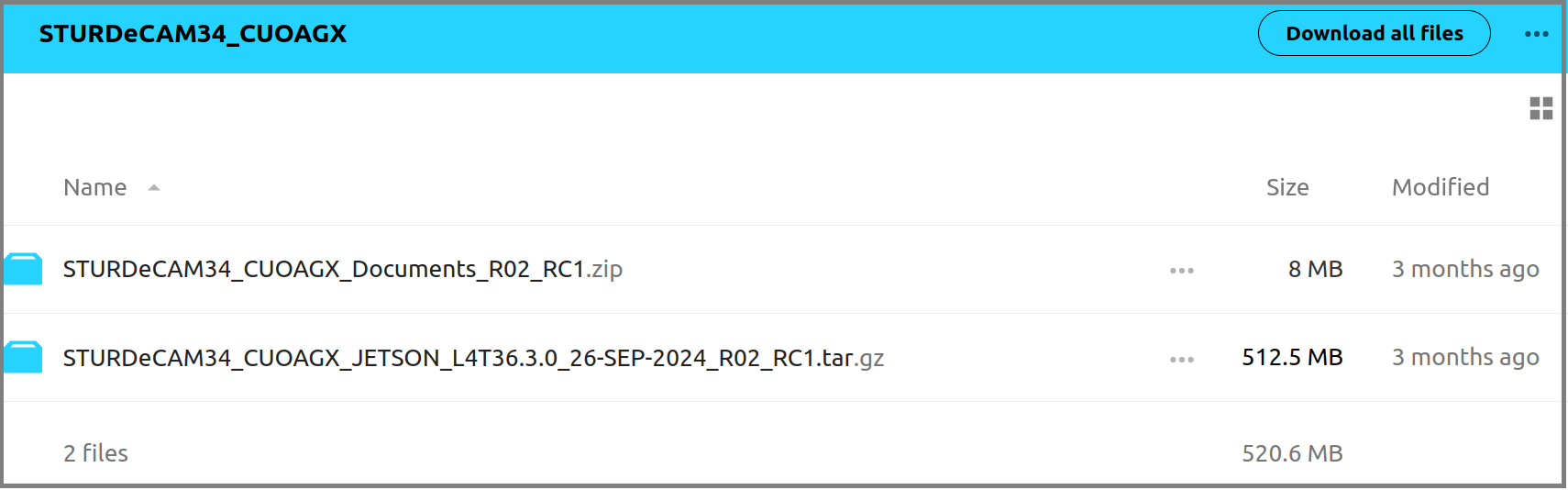
Abbildung 5: Produktdokument und Paketdetails der Kamera
Schritt 3. Extrahieren und Vorbereiten von L4T
Nachdem Sie die NVIDIA®-Quelldateien und das Release-Paket des e-con Systems®-Produkts heruntergeladen haben, müssen Sie diese auf dem Linux-basierten System extrahieren und organisieren, um die Binärdateien gemäß dem Entwicklerhandbuch zu erstellen. Beachten Sie, dass die Erstellungsbefehle für JetPack 6.0 dokumentiert sind. Ersetzen Sie beim Ausführen dieser Befehle den heruntergeladenen Dateinamen von JetPack 6.2 durch JetPack 6.0 und 6.1. Den korrekten Namen von JetPack 6.2 finden Sie in der folgenden Tabelle.
| NVIDIA-Paket | JetPack 6.0 | JetPack 6.1 | JetPack 6.2 |
| BootlinTool- chain | aarch64–glibc–stable-2022.08-1.tar.bz2 | aarch64–glibc–stable-2022.08-1.tar.bz2 | aarch64–glibc–stable-2022.08-1.tar.bz2 |
| L4T Jetson AGX Orin™, Orin Nano™, Orin NX driver Package | Jetson_Linux_R36.3.0_aarch64.tbz2 | Jetson_Linux_R36.4.0_aarch64.tbz2 | Jetson_Linux_R36.4.3_aarch64.tbz2 |
| L4T Jetson AGX Orin™, Orin Nano™, Orin NX sample Rootfs | Tegra_Linux_Sample-Root- Filesystem_R36.3.0_aarch64.tbz2 | Tegra_Linux_Sample-Root- Filesystem_R36.4.0_aarch64.tbz2 | Tegra_Linux_Sample-Root- Filesystem_R36.4.3_aarch64.tbz2 |
| Driver Package source | public_sources.tbz2 | public_sources.tbz2 | public_sources.tbz2 |
Tabelle 3: JetPack 6.0, 6.1 und 6.2 Dateinamen
Schritt 4. Extrahieren des Release-Pakets
Nachdem Sie das NVIDIA-Paket extrahiert haben, sollten Sie das Release-Paket von e-con extrahieren.
Sie können das extrahierte Release-Paket von e-con als unten gezeigtes Referenzbild anzeigen.
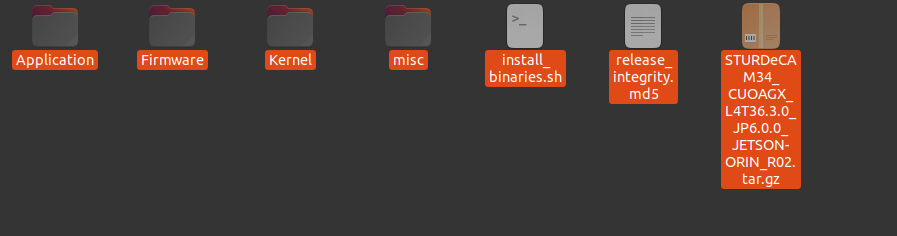
Abbildung 6: Release-Paketdateien von e-con
Nachdem Sie die Paketdateien von NVIDIA und e-con Systems® an einem Ort gesammelt haben, müssen Sie den Kernel so konfigurieren, dass er Ihre spezifische Kamerahardware unterstützt.
Schritt 5. Herunterladen und Konfigurieren des Kernels
Nach dem Herunterladen müssen Sie den Kernel konfigurieren, indem Sie Patches aus dem e-con JetPack 6.0-Releasepaket auf NVIDIA JetPack 6.2 anwenden.
Hinweis:
- Laden Sie bitte Ihr Produktentwicklerhandbuch aus den Entwicklerressourcen von e-con herunter und befolgen Sie die Schritte 1 bis 4 für die Build-Befehle im Abschnitt „Herunterladen und Konfigurieren des Kernels“.
- Laden Sie die Driver paketquelle wie in Tabelle 2 oben aufgeführt herunter.
Nach den Schritten 1 bis 4 im Abschnitt „Herunterladen und Konfigurieren des Kernels“ müssen Sie die folgenden Befehle ausführen, um die e-Con-Patchdateien anzuwenden.
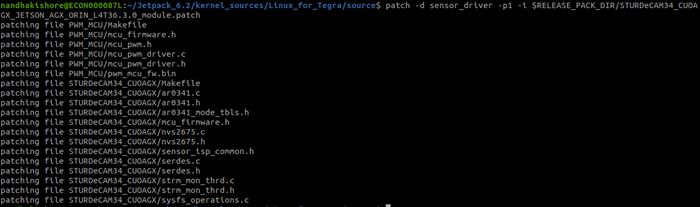
a. Führen Sie den folgenden Befehl aus, um den Modul-Patch anzuwenden.
mkdir -p sensor_driver
patch -d sensor_driver -p1 -i $RELEASE_PACK_DIR/Kernel/<module patch file name>
Der Bildschirm wird ähnlich wie der unten gezeigte Bildschirm angezeigt.
b. Führen Sie den folgenden Befehl aus, um die VCC -Versorgung zu entfernen.
sed -i 's/vcc-supply/\/\/vcc-supply/g' $RELEASE_PACK_DIR/Kernel/<device tree overlay blob patch file name>
c. Führen Sie den folgenden Befehl aus, um das Device Tree Blob Overlay Patch-Datei anzuwenden.
patch -p1 -i $RELEASE_PACK_DIR/Kernel/<device tree overlay blob patch file name>
Nach dem Anwenden der Device-Tree-Blob-Overlay-Patch-Datei erscheint der Ausgabebildschirm ähnlich dem unten gezeigten Bildschirm.

Wenn beim Anwenden eines Device Tree-Blob-Overlay-Patches eine Meldung wie die oben gezeigte angezeigt wird, geben Sie „nein“ ein. Wenn diese Meldung nicht angezeigt wird, können Sie diesen Schritt überspringen und mit dem nächsten fortfahren.
Die Ausgabemeldung wird auf dem Linux-basierten System angezeigt, wenn Sie wie unten gezeigt „Nein“ eingeben.
patching file hardware/nvidia/t23x/nv-public/nv-soc/tegra234-soc-camera.dtsi
Reversed (or previously applied) patch detected! Assume -R? [n] n
Apply anyway? [n] n
Skipping patch.
5 out of 5 hunks ignored -- saving rejects to file hardware/nvidia/t23x/nv-public/nv-soc/tegra234-soc-camera.dtsi.rej
patching file hardware/nvidia/t23x/nv-public/overlay/Makefile
Hunk #1 succeeded at 65 (offset 5 lines).
patching file hardware/nvidia/t23x/nv-public/overlay/<camera_modes>.dtsi
patching file hardware/nvidia/t23x/nv-public/overlay/<camera_overlay_filename>.dts
d. Führen Sie den folgenden Befehl aus, um die Funktionen g_parm und s_parm aus dem Patch nvidia-oot zu entfernen.
Für MIPI-Kameraprodukte (e-CAM50_CUONX, e-CAM56_CUONX, e-CAM80_CUONX, e-CAM81_CUONX, e-CAM200_CUONX, e-CAM80_CUOAGX, e-CAM200_CUOAGX),
sed '/@@ -2224,6 +2227,26 @@ static long tegra_channel_default_ioctl/,/tegra_channel_close/d' $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name> > tempfile && mv tempfile $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name>
Für e-CAM_YUV_GMSL-Kameraprodukte (NileCAM20_CUOAGX, NileCAM21_CUOAGX, NileCAM25_CUOAGX, NileCAM81_CUOAGX, STURDeCAM20_CUOAGX, STURDeCAM21_CUOAGX).
sed '/@@ -2224,6 +2223,26 @@ static long tegra_channel_default_ioctl/,/tegra_channel_close/d' $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name> > tempfile && mv tempfile $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name>
Für e-CAM_OCTA_YUV_GMSL PRODUCT-basierte Produkte (STURDeCAM25_CUOAGX, STURDeCAM31_CUOAGX & STURDeCAM81_CUOAGX) and STURDeCAM34_CUOAGX).
sed '/@@ -2224,6 +2231,26 @@ static long tegra_channel_default_ioctl/,/tegra_channel_close/d' $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name> > tempfile && mv tempfile $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name>
After removing the g_parm and s_parm functions, you need to apply the Nvidia-oot patch.
e. Führen Sie den folgenden Befehl aus, um die nvidia-oot-Patchdatei anzuwenden.
patch -p1 -i $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name>
Wenn beim Anwenden des Nvidia- oot -Patches das Makefile nicht automatisch aktualisiert wird,erscheint der unten gezeigte Ausgabebildschirm.
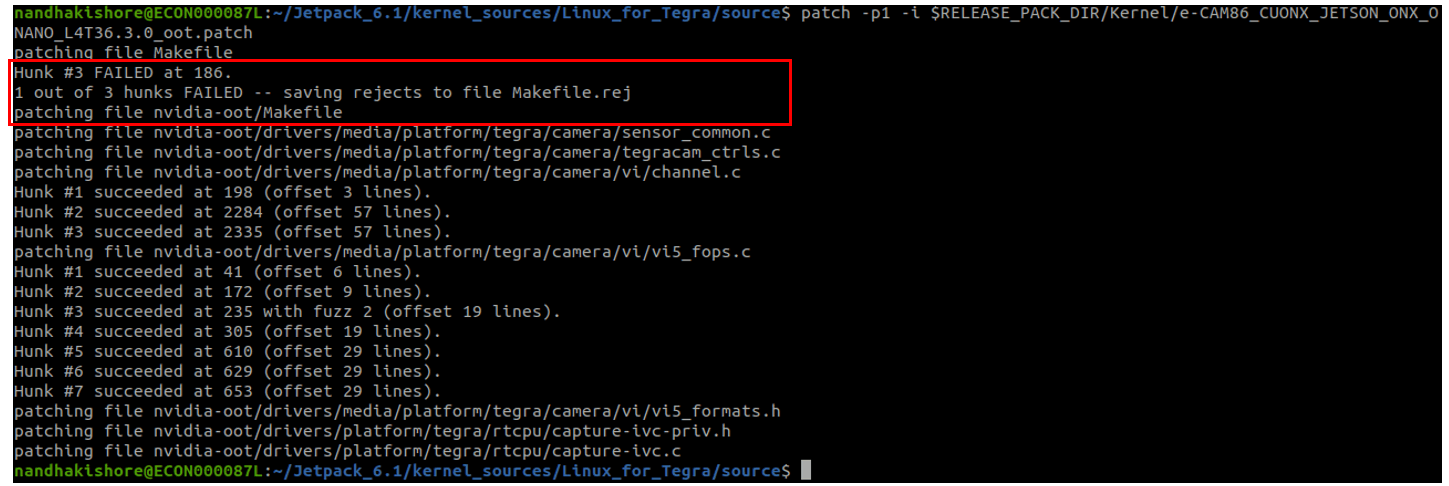
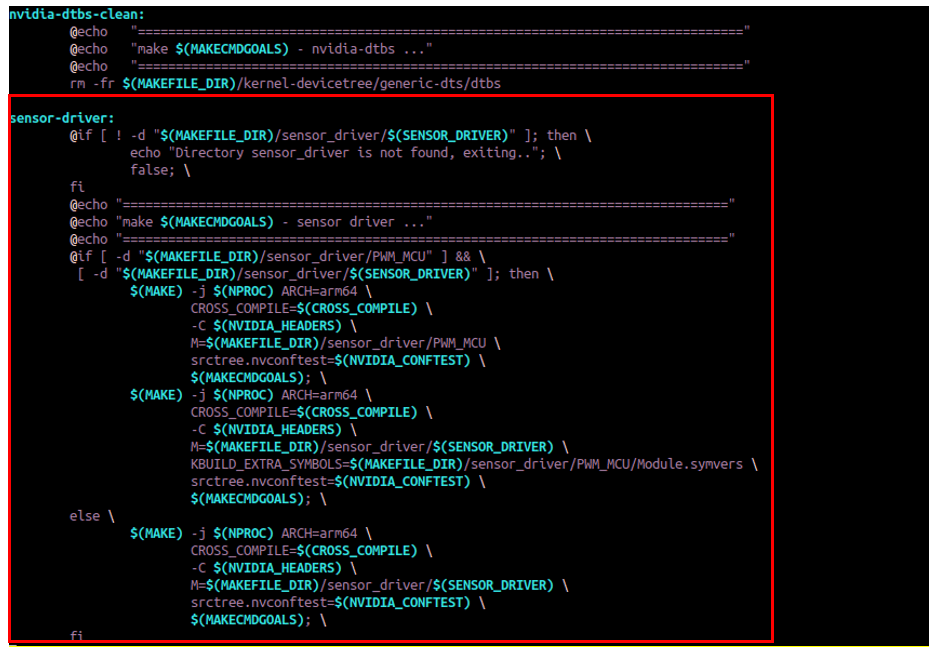
Wenn das Makefile nicht automatisch aktualisiert wird, sollten Sie das nvidia-oot-Makefile manuell hinzufügen, indem Sie den unten angegebenen sensor-driver-Block in das Kernel-Quell-Makefile einfügen.
sensor-driver:
@if [ ! -d “$(MAKEFILE_DIR)/sensor_driver/$(SENSOR_DRIVER)” ]; then \
echo “Directory sensor_driver is not found, exiting..”; \
false; \
fi
@echo “================================================================================”
@echo “make $(MAKECMDGOALS) – sensor driver …”
@echo “================================================================================”
@if [ -d “$(MAKEFILE_DIR)/sensor_driver/PWM_MCU” ] && \
[ -d “$(MAKEFILE_DIR)/sensor_driver/$(SENSOR_DRIVER)” ]; then \
$(MAKE) -j $(NPROC) ARCH=arm64 \
CROSS_COMPILE=$(CROSS_COMPILE) \
-C $(NVIDIA_HEADERS) \
M=$(MAKEFILE_DIR)/sensor_driver/PWM_MCU \
srctree.nvconftest=$(NVIDIA_CONFTEST) \
$(MAKECMDGOALS); \
$(MAKE) -j $(NPROC) ARCH=arm64 \
CROSS_COMPILE=$(CROSS_COMPILE) \
-C $(NVIDIA_HEADERS) \
M=$(MAKEFILE_DIR)/sensor_driver/$(SENSOR_DRIVER) \
KBUILD_EXTRA_SYMBOLS=$(MAKEFILE_DIR)/sensor_driver/PWM_MCU/Module.symvers \
srctree.nvconftest=$(NVIDIA_CONFTEST) \
$(MAKECMDGOALS); \
else \
$(MAKE) -j $(NPROC) ARCH=arm64 \
CROSS_COMPILE=$(CROSS_COMPILE) \
-C $(NVIDIA_HEADERS) \
M=$(MAKEFILE_DIR)/sensor_driver/$(SENSOR_DRIVER) \
srctree.nvconftest=$(NVIDIA_CONFTEST) \
$(MAKECMDGOALS); \
fi
Wenn Sie Probleme haben, die Binärdateien mit dem nvidia-oot-Makefile zu erstellen, zeigt das folgende Bild die richtige Makefile-Struktur.
 In Kernel-Quelltext-Makefile
In Kernel-Quelltext-Makefile
f. Führen Sie den folgenden Befehl aus, um ein ordnungsgemäßes Kamera-Streaming zu gewährleisten.
Für MIPI-Produkte (e-CAM50_CUONX, e-CAM56_CUONX, e-CAM80_CUONX, e-CAM81_CUONX, e-CAM200_CUONX, e-CAM80_CUOAGX, e-CAM200_CUOAGX),
sed '238,238d' $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c > tempfile && mv tempfile $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c
sed '228i#endif' $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c > tempfile && mv tempfile $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c
Für e-CAM_YUV_GMSL-Produkte (NileCAM20_CUOAGX, NileCAM21_CUOAGX, NileCAM25_CUOAGX, NileCAM81_CUOAGX, STURDeCAM20_CUOAGX, STURDeCAM21_CUOAGX),
sed '236,236d' $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c > tempfile && mv tempfile $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c
sed '226i#endif' $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c > tempfile && mv tempfile $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c
Für e-CAM_OCTA_YUV_GMSL-Produkte (STURDeCAM25_CUOAGX, STURDeCAM31_CUOAGX & STURDeCAM81_CUOAGX) and STURDeCAM34_CUOAGX,
sed '240,240d' $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c > tempfile && mv tempfile $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c
sed '230i#endif' $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c > tempfile && mv tempfile $NVIDIA_SRC/nvidia-oot/drivers/media/platform/tegra/camera/vi/vi5_fops.c
Nach der erfolgreichen Kernelkonfiguration besteht der nächste Schritt darin, die erstellten Binärdateien zu erstellen und zu installieren.
Schritt 6. Erstellen des Kernels
In diesem Abschnitt geht es um das Erstellen des Kernel-Images, dtbo und der Module für das Jetson SoM auf dem Linux-basierten System.
Führen Sie die folgenden Befehle aus, um die Binärdateien zu erstellen.
make -C kernel
make modules
sudo -E make modules_install
make dtbs
Nachdem Sie die Binärdateien erfolgreich erstellt haben, müssen Sie das SoM flashen.
Schritt 7. Jetson SoM flashen
Nun müssen Sie das Jetson™ SoM mithilfe der Build-Binärdateien auf zwei Arten flashen. Im folgenden Abschnitt werden die beiden Möglichkeiten zum Flashen des Jetson SoM detailliert beschrieben.
7.1 Verwendung des Entwicklerhandbuchs
Um das Jetson SoM zu flashen , führen Sie die Befehle aus, die im Abschnitt „Flashen des Jetson Development Kits“ des Entwicklerhandbuchs angegeben sind.
Hinweis: Bitte laden Sie Ihr Entwicklerhandbuch aus den e-con Entwicklerressourcen herunter, um das Jetson SoM zu flashen.
7.2 Verwenden des SDK-Managers
Eine weitere Methode zum Flashen des Jetson SoM ist die Verwendung des NVIDIA SDK Managers. Befolgen Sie dazu die folgenden Schritte.
- Gehen Sie zur offiziellen Website von NVIDIA und laden Sie den NVIDIA® SDK Manager herunter.
- Installieren Sie den SDK Manager und melden Sie sich mit Ihrem NVIDIA-Entwicklerkonto an.
- Wählen Sie Ihre Jetson SoM- und JetPack 6.2-Version und folgen Sie dann den Schritt-für-Schritt-Anweisungen zur Installation von JetPack 6.2.
Nachdem Sie das Jetson SoM geflasht haben , ist es an der Zeit, die erforderlichen Binärdateien auf das Jetson SoM zu übertragen .
7.2.1 Binärdateien auf dem Jetson SoM bereitstellen
In diesem Schritt kopieren Sie die Binärdateien und platzieren alle wichtigen Komponenten, einschließlich der benutzerdefinierten Module, DTBO-Dateien, Firmware und sonstiger Dateien, ordnungsgemäß, um die Kameraintegration auf dem NVIDIA Jetson SoM zu ermöglichen. Um diesen Vorgang abzuschließen, müssen Sie die folgenden Schritte ausführen.
- Führen Sie den folgenden Befehl aus, um zum L4T-Verzeichnispfad in Ihrem Linux-basierten System zu navigieren.
cd $NVIDIA_SRC/kernel-devicetree/generic-dts/dtbs/
- Verbinden Sie das Jetson SoM und den Host-PC mit einem USB-Kabel Typ C.
- Führen Sie den folgenden Befehl aus, um das Device Tree Blob Overlay in Jetson™
scp tegra234-p3767-camera-p3768-eimx568-4lane.dtbo nvidia@192.168.55.1:Hinweis: Der DTBO-Dateiname muss als der im Entwicklerhandbuch angegebene Name verwendet werden.
- Führen Sie die folgenden Befehle aus, um alle Kernelmodule zu komprimieren und auf das Jetson SoM zu kopieren.
cd $LDK_ROOTFS_DIR/lib/
sudo tar -cjmpf kernel_supplements.tar.bz2 modules/
- Führen Sie den folgenden Befehl aus, um alle Kernelmodule auf das Jetson SoM zu kopieren.
scp kernel_supplements.tar.bz2 nvidia@192.168.55.1:
- Führen Sie die folgenden Befehle aus, um die Firmware-Datei in Jetson SoM.
cd $TOP_DIRHinweis: Sie können den obigen Befehl überspringen, wenn das Release-Paket von e-con das Firmware-Verzeichnis nicht enthält. Wenn Ihre Kamera einen NVIDIA-ISP verwendet, müssen Sie die folgenden Befehle ausführen, um die Tuning-Dateien aus dem Release-Paket von e-con auf Ihr Jetson SoM zu kopieren und so die beste Bildqualität zu erzielen.
scp -r $RELEASE_PACK_DIR/<Firmware directory name> nvidia@192.168.55.1:
cd $TOP_DIR
scp $RELEASE_PACK_DIR/misc/<camera overrides file name> nvidia@192.168.55.1:
- Führen Sie die folgenden Befehle aus, um die von Nvidia bereitgestellte v4l2-Compliance-Binärdatei zu aktualisieren.
cd $TOP_DIR
scp $RELEASE_PACK_DIR/misc/v4l2-compliance nvidia@192.168.55.1:
7.2.2 Bereitstellen von Binärdateien im Root-Verzeichnis auf dem Jetson SoM aus dem Home-Ordner
- Führen Sie den folgenden Befehl aus, um die Firmware in den entsprechenden Pfad im Jetson™ SoM.
sudo cp <firmware directory name>/* /lib/firmwareHinweis : Sie können den obigen Befehl überspringen, wenn das Release-Paket von e-con das Firmware-Verzeichnis nicht enthält.
- Führen Sie den folgenden Befehl aus, um das Device Tree Blob Overlay in den entsprechenden Pfad im Jetson SoM
sudo cp tegra234-p3767-camera-p3768-eimx568-4lane.dtbo /boot/
Hinweis: Der DTBO-Dateiname muss wie im Entwicklerhandbuch angegeben verwendet werden.
- Führen Sie den folgenden Befehl aus, um die Kernel-Ergänzungen in ihren spezifischen Pfad im Jetson SoM zu kopieren.
sudo tar -xjmpf kernel_supplements.tar.bz2 -C /usr/lib/
- Führen Sie den folgenden Befehl aus, um die ISP-Tuning-Datei in den entsprechenden Pfad im Jetson SoM
sudo cp <camera overrides file name> /var/nvidia/nvcam/settings/camera_overrides.ispHinweis : Wenn das Release-Paket von e-con nicht über die Datei camera_overrides.isp verfügt , überspringen Sie den obigen Schritt.
Nachdem Sie das Jetson SoM geflasht haben , ist es an der Zeit, das erforderliche Overlay und die Driver zu laden.
Schritt 8. Overlay und Driver laden
Wenn der Jetson SoM geflasht ist, führen Sie abschließend den folgenden Befehl aus, um die Overlay-Datei für Ihre Module zu laden.
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n2="<Overlay_name>"
Hinweis: Verwenden Sie den Overlay-Namen, der im Entwicklerhandbuch angegeben ist.
Es erscheint eine Meldung, wie unten gezeigt.
Modified /boot/extlinux/extlinux.conf to add following
DTBO entries:
/boot/<dtbo_name>
System neu starten, um es neu zu konfigurieren.
Nach der Anwendung des Overlays ist ein Systemneustart erforderlich, um die neue Konfiguration zu aktivieren. Während des Bootvorgangs lädt das Jetson SoM die aktualisierten DTBO-Einstellungen und stellt so sicher, dass die ausgewählte Hardwarekonfiguration nahtlos angewendet wird und das Jetson™ SoM automatisch neu startet.
Hinweis:Für die Produkte e-CAM_OCTA_YUV_GMSL (STURDeCAM25_CUOAGX, STURDeCAM31_CUOAGX and STURDeCAM81_CUOAGX), geben Sie die Reihenfolge der Module mit den folgenden Befehlen an.
sudo bash -c 'echo "tegra_camera" >> /etc/modules'
sudo bash -c 'echo "capture_ivc" >> /etc/modules'
sudo bash -c 'echo "max96712" >> /etc/modules'
sudo bash -c 'echo "mcu_pwm" >> /etc/modules'
sudo bash -c 'echo "ecam_gmsl_yuv_common" >> /etc/modules'
Für das Produkt STURDeCAM34_CUOAGX geben Sie die Reihenfolge der Modulladung mit den folgenden Befehlen an.
sudo bash -c 'echo "tegra_camera" >> /etc/modules'
sudo bash -c 'echo "capture_ivc" >> /etc/modules'
sudo bash -c 'echo "max96712" >> /etc/modules'
sudo bash -c 'echo "mcu_pwm" >> /etc/modules'
sudo bash -c 'echo "ar0341_camera" >> /etc/modules'
Schritt 9. Kameraüberprüfung
Nachdem Sie alles eingestellt haben, müssen Sie überprüfen, ob das System das Gerät erkennt. Nachdem die Kamera erkannt wurde, müssen Sie das Kamera-Streaming mit V4L2 oder GStreamer überprüfen .
Nachdem Sie nun das Verfahren zum Aktualisieren der Kamera von JetPack 6.0 auf JetPack 6.2 gesehen haben, sehen wir uns an, wie Sie von JetPack 6.1 auf JetPack 6.2 aktualisieren können.
Upgrade von JetPack 6.1 auf JetPack 6.2
Um die Kameraprodukte JetPack 6.1 auf JetPack 6.2 zu aktualisieren, befolgen Sie die Schritte 1 bis 4 aus dem ersten Abschnitt, Aktualisieren von JetPack 6.0 auf JetPack 6.2 , und befolgen Sie dann die folgenden Schritte aus dem zweiten Abschnitt, Aktualisieren von JetPack 6.1 auf JetPack 6.2 .
Hinweis :
- Laden Sie bitte Ihr Produktentwicklerhandbuch aus den Entwicklerressourcen von e-con herunter und befolgen Sie die Schritte 1 bis 4 für die Build-Befehle im Abschnitt „Herunterladen und Konfigurieren des Kernels“.
- Laden Sie bitte die Driver pakete herunter, die in der obigen Tabelle 2 aufgeführt sind.
Befolgen Sie die nachstehenden Schritte, um die Patchdateien anzuwenden.
a. Führen Sie den folgenden Befehl aus, um den Modul-Patch anzuwenden.
mkdir -p sensor_driver
patch -d sensor_driver -p1 -i $RELEASE_PACK_DIR/Kernel/<module patch file name>
Der Bildschirm sieht ähnlich aus wie der unten gezeigte Bildschirm.

b. Führen Sie den folgenden Befehl aus, um die VCC -Versorgung zu entfernen.
sed -i 's/vcc-supply/\/\/vcc-supply/g' $RELEASE_PACK_DIR/Kernel/<device tree overlay blob patch file name>
c. Führen Sie den folgenden Befehl aus, um die Patchdatei für das Device Tree Blob Overlay Patch-Datei anzuwenden.
patch -p1 -i $RELEASE_PACK_DIR/Kernel/<device tree overlay blob patch file name>
Nach der Anwendung der Device-Tree-Blob-Overlay-Patch-Datei erscheint ein Bildschirm ähnlich dem unten abgebildeten.

d. Führen Sie den folgenden Befehl aus, um die Funktionen g_parm und s_parm aus dem Nvidia-oot -Patch zu entfernen.
Für e-CAM25_CUONX ,
sed '/@@ -2281,6 +2285,28 @@ static long tegra_channel_default_ioctl/,/tegra_channel_close/d' $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name> > tempfile && mv tempfile $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name>
Für e-CAM86_CUONX,
sed '/@@ -2281,6 +2288,26 @@ static long tegra_channel_default_ioctl/,/tegra_channel_close/d' $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name> > tempfile && mv tempfile $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name>
Nachdem Sie die Funktionen g_parm und s_parm entfernt haben, führen Sie den folgenden Befehl aus, um die nvidia-oot-Patchdatei anzuwenden.
patch -p1 -i $RELEASE_PACK_DIR/Kernel/<nvidia-oot patch file name>
Sie müssen den nvidia-oot-Patch ohne Probleme anwenden. Sie erhalten keine Warnungen oder Hunk-Fehler.
Befolgen Sie dann das gleiche Verfahren von Schritt 6: Erstellen und Installieren des Kernels bis Schritt 9: Kameraüberprüfung im ersten Abschnitt, Upgrade von JetPack 6.0 auf JetPack 6.2 um die Kamera zu überprüfen.
e-con Systems treibt Innovationen im Bereich Embedded Vision voran
Seit 2003 konzipiert, entwickelt und fertigt e-con Systems® hochmoderne OEM-Kameras. Als NVIDIA Elite-Partner bieten wir eine nahtlose Integration mit der Jetson-Plattform, einschließlich Jetson AGX Orin™, NVIDIA® Jetson Orin NX/Nano™, Jetson Xavier™ NX/Nano/TX2 NX und Jetson AGX Xavier™, um Kunden bei der Umstellung auf KI-gestützte Embedded-Anwendungen zu unterstützen.
Unten finden Sie die Liste der Kameras, die Sie von NVIDIA JetPack 6.0 auf NVIDIA JetPack 6.2 aktualisieren können.
- STURDeCAM20_CUOAGX – IP67 Full HD GMSL2 HDR camera for Jetson AGX Orin™ / AGX Xavier™
- STURDeCAM21_CUOAGX – IP67 Full HD GMSL2 HDR Camera for Jetson AGX Orin™ / AGX Xavier™
- STURDeCAM25_CUOAGX – FHD AR0234 IP67 Global Shutter GMSL2 Multi Camera for NVIDIA Jetson AGX ORIN™ / AGX Xavier™
- STURDeCAM31_CUOAGX – 3MP 120dB HDR NVIDIA® Jetson Orin™ Camera for Autonomous Mobility
- STURDeCAM34_CUOAGX – 3MP 140dB HDR GMSL2 Camera for NVIDIA® Jetson AGX Orin™
- STURDeCAM81_CUOAGX – IP67 4K GMSL2 Camera for NVIDIA® Jetson AGX Orin™/ AGX Xavier™
- NileCAM20_CUOAGX – Full HD GMSL2 HDR camera for Jetson AGX Orin™ / AGX Xavier™
- NileCAM21_CUOAGX – HDR GMSL2 Multi-Camera Solution for NVIDIA® Jetson AGX Orin™ / AGX Xavier™
- NileCAM25_CUOAGX – Full HD GMSL2 Global Shutter camera for NVIDIA® Jetson™ AGX Orin™ / AGX Xavier™
- NileCAM81_CUOAGX – AR0821 4K HDR GMSL2 Camera for NVIDIA® Jetson AGX Orin™/ AGX Xavier™
- e-CAM200_CUOAGX – 20MP(5K) AR2020 High Resolution Multi-camera Solution for NVIDIA® Jetson AGX Orin™
- e-CAM80_CUOAGX – 4K camera based on SONY IMX415 for NVIDIA® Jetson AGX Orin™/ AGX Xavier™
- e-CAM50_CUONX – 5MP AR0521 Color Camera for NVIDIA® Jetson Orin NX / Orin Nano
- e-CAM56_CUONX – 5MP IMX568 Global shutter Camera for NVIDIA® Jetson Orin NX™/Orin Nano™
- e-CAM80_CUONX – 4K Sony Starvis IMX415 Ultra Low Light Camera for NVIDIA® Jetson Orin NX / Orin Nano
- e-CAM81_CUONX – 4K HDR Camera for NVIDIA® Jetson Orin NX / Orin Nano
- e-CAM200_CUONX – 20MP (5K) AR2020 High Resolution Camera for NVIDIA® Jetson Orin NX / Orin Nano
Unten finden Sie die Liste der Kameras, die Sie von NVIDIA JetPack 6.1 auf NVIDIA JetPack 6.2 aktualisieren können.
- e-CAM25_CUONX – FHD AR0234 Global Shutter Camera for NVIDIA® Jetson Orin NX / Orin Nano
- e-CAM86_CUONX – 8MP Sony® Starvis 2 IMX678 Camera for NVIDIA® Jetson Orin NX / Orin Nano
Unsere Kameralösungen bieten Multikamera-Unterstützung für bis zu 8 Kameras, hohe Auflösungen von bis zu 20 MP, hervorragende Bildgebung bei schwachem Licht, fein abgestimmtes ISP, LFM, Global Shutter und mehr.
Sehen Sie sich alle unsere Kameras basierend auf der NVIDIA Jetson-Plattform an
Entdecken Sie die Kameraauswahl um alle unsere Kameraprodukte anzuzeigen.
Für spezialisierte Expertenunterstützung kontaktieren Sie uns bitte unter camerasolutions@e-consystems.com. Unsere Experten unterstützen Sie bei der Auswahl und nahtlosen Integration der perfekten Kamera für Ihre Anwendung.

Prabu ist Chief Technology Officer und Head of Camera Products bei e-con Systems und verfügt über eine reiche Erfahrung von mehr als 15 Jahren im Bereich der eingebetteten Bildverarbeitung. Er bringt umfassende Kenntnisse in den Bereichen USB-Kameras, eingebettete Bildverarbeitungskameras, Bildverarbeitungsalgorithmen und FPGAs mit. Er hat über 50 Kameralösungen für verschiedene Bereiche wie Medizin, Industrie, Landwirtschaft, Einzelhandel, Biometrie und mehr entwickelt. Er verfügt außerdem über Fachwissen in der Gerätetreiberentwicklung und BSP-Entwicklung. Derzeit liegt der Schwerpunkt von Prabu auf der Entwicklung intelligenter Kameralösungen, die KI-basierte Anwendungen des neuen Zeitalters ermöglichen.