

Lens datasheets often include distortion information to help photographers and engineers understand how the lens behaves. Lens distortion refers to the phenomenon where straight lines in a scene appear curved in the final image. This happens because lenses don’t perfectly focus light from all parts of the field of view.
In this blog, we break down distortion parameters in lens datasheets and the three ways in which distortion is represented.
Types of Lens Distortion
There are three main types of lens distortion that occur commonly in photography, which are:
- Barrel Distortion: This makes straight lines bend outwards, like the bulge in a barrel. It’s common in wide-angle lenses.
- Pincushion Distortion: This makes straight lines bend inwards, like the sinking in a pincushion. It’s more common in telephoto lenses.
- Mustache Distortion (Waveform Distortion): This is a less common distortion where straight lines appear wavy, like a Mustache.
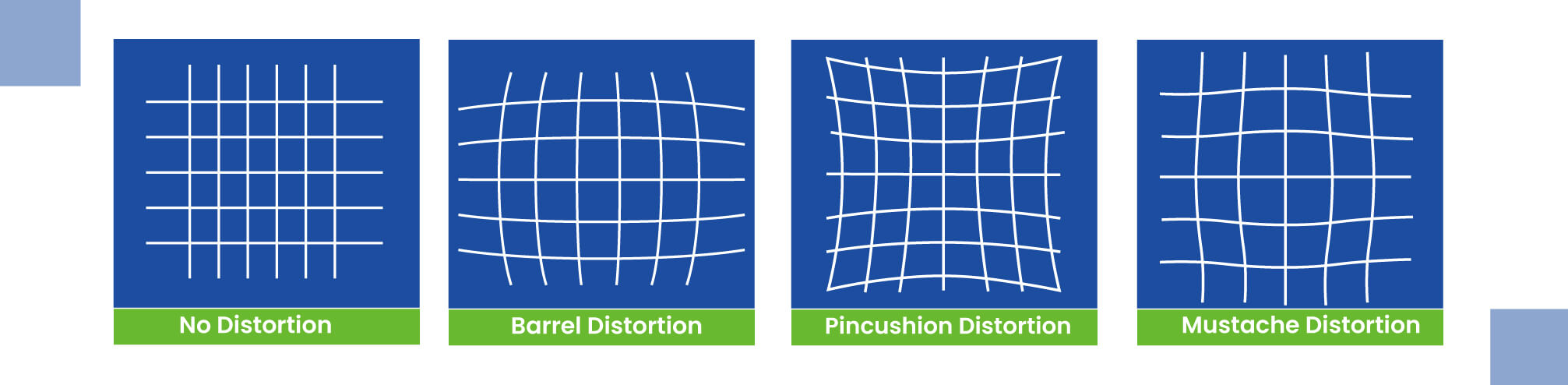
Here’s a visualization to understand to differentiate the above distortions better:
Imagine a scene with a square grid. In barrel distortion, the grid would bulge outwards, making the squares appear wider on the edges. Meanwhile, in pincushion distortion, the grid would sink inwards, making the squares appear narrower on the edges. Mustache distortion would cause the grid lines to become wavy.
Mathematical Representation of Distortion in Three Ways
Mathematically, distortion can be represented in three different ways in the lens datasheet; let us look at each of them in detail.
1. Optical/Rectilinear/F-Tan (theta)
Optical distortion represents the overall distortion parameter of the optical system. F-Tan theta or optical distortion can be calculated using the following formula.
F-Tan (Theta) distortion = (Real Image height – Reference Image height/reference Image height) *100
Were,
Reference Image Height (mm)=focal length (mm) X Tan (Half Maximum DFOV in degrees)
Example: Let us calculate the barrel distortion using the half-angle method formula given above.
-
Gather Measurements:
Effective Focal Length (F): 4.4mm (distance from the lens’s optical center to the image sensor)
Diagonal Field of View (FOV) at a Specific Image Distance: Values provided at different image distances (e.g., 124° @ 10mm)
Image Diagonal Dimension: 10mm (diagonal size of the image sensor)
-
Calculate the Reference Height:
This represents the ideal height an object would have if there were no distortion.
Half Diagonal FOV: Divide the diagonal FOV by 2 (e.g., 124° / 2 = 62°)
Reference Height = F * tan (Half Diagonal FOV): (4.4mm * tan (62°)) = 8.27519mm
-
Calculate Distortion Percentage:
Real Height: Half of the image’s diagonal dimension (5mm in this case)
Distortion% = ((Real Height – Reference Height) / Reference Height) * 100%
This calculates the percentage difference between the actual object height and its ideal height due to distortion.
A negative value indicates barrel distortion (objects appear smaller towards the edges). In the above example, the calculation shows a higher barrel distortion (-39.5%) at a larger image distance (10mm). As the image distance decreases (9mm and 5mm), the distortion percentages become less negative, indicating a decrease in the barrel effect.
The F*tan(theta) method is a more general approach to calculating distortion. It’s often used for initial distortion assessment in various lenses, including photographic lenses. This method helps understand how straight lines deviate from their ideal positions due to distortion.
F*tan(theta) calculations are used in camera calibration processes, where distortion parameters are estimated for correcting captured images. Lens designers often utilize F*tan(theta) calculations during the design phase to predict and minimize distortion in the final lens. This helps create lenses with minimal image curvature and ensures accurate image reproduction.
2. F(theta)
F(Theta) method focuses on the angular relationship between the ideal undistorted image point and the actual distorted image point without needing magnification information.
Steps To Calculate F-Theta Distortion with F*theta (radians):
- Convert half the diagonal FOV (theta/2) from degrees to radians (multiply by pi/180).
- Multiply the focal length (F) by the angle in radians to get the reference height (ideal, undistorted image height based on angular position).
- Compare the real image height with the reference height to calculate the distortion percentage.
F-Theta lenses are specifically designed to maintain a constant image size (or spot size for lasers) across a scan field. The F-Theta calculation helps ensure the accuracy of this constant size by measuring deviations from the ideal. These lenses are used in various applications like laser marking and engraving, laser cutting, 3D printing and LiDAR.
The F-Tan (Theta) method uses the tangent function to relate the angle to object size and magnification. Whereas the F(Theta) method focuses on the angular position of the image point relative to the centre. Both the methods require the focal length (F) and the diagonal FOV (degrees). But in the F(Theta) method the FOV in degrees is converted to radians.
F-Tan (Theta) method uses the tan(theta) relationship to calculate a reference height based on magnification, and the F(Theta) method uses F*theta (radians) to represent the ideal image point location based on its angular position.
Both methods can be used to estimate distortion, but they can be more applicable in certain situations. F-Tan (Theta) is preferred when the focus is on object size and magnification changes due to distortion. And the F(Theta) method is used to get the angular relationship of distorted image points without needing magnification information.
3. TV Distortion
TV Distortion, as the name suggests, originated in the context of television applications. It can be calculated using the following formula:
TV distortion (Barrel) = ((Reference Image Height – Real Image Height)/(Real Image Height)] x 100 )/2
The above given formula is of distortion at half FOV.
The above-given formula calculates barrel distortion based on several factors, which are:
- Image Sensor Dimensions: Half diagonal size and half vertical size of the image sensor are used in the calculation.
- Optical Distortion Values: These values represent the degree of distortion, expressed as a negative percentage for barrel distortion. The formula uses separate distortion values for the Diagonal Field of View (DFOV) and Vertical Field of View (VFOV) of the lens.
- Cosine of Diagonal Field of View (cos (DFOV)): This mathematical term incorporates the angle of the diagonal field of view into the calculation.
The formula calculates the difference between the expected height of an object based on the sensor size and its actual distorted height based on the distortion values and field of view. This difference is then expressed as a percentage of the vertical sensor size to provide a measure of barrel distortion.
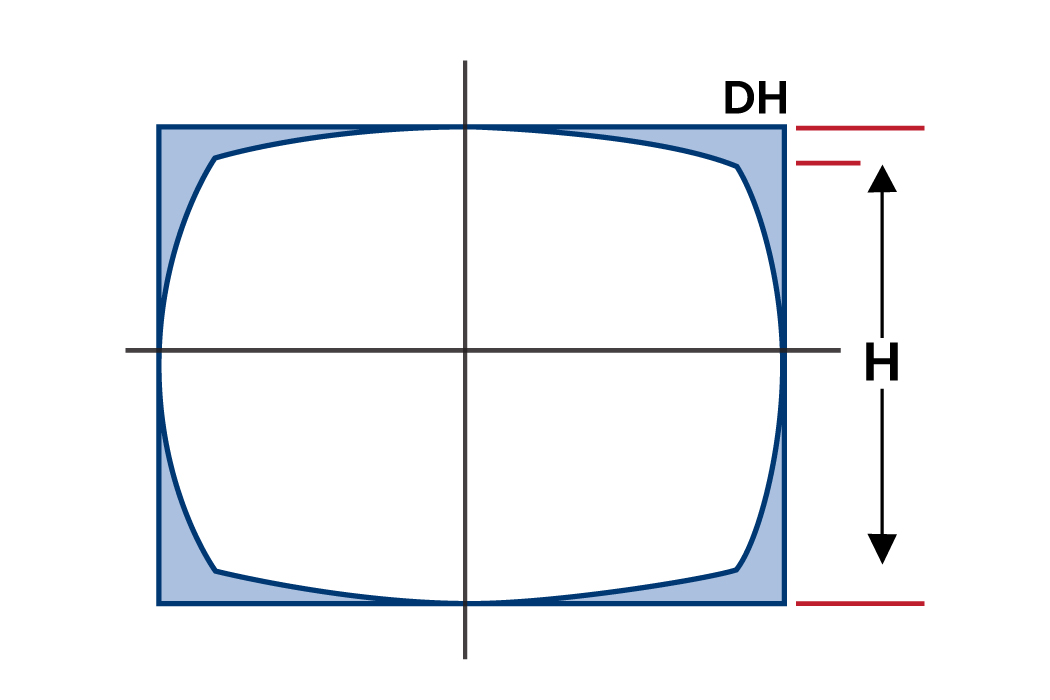
Figure 1: TV Distortion – Barrel
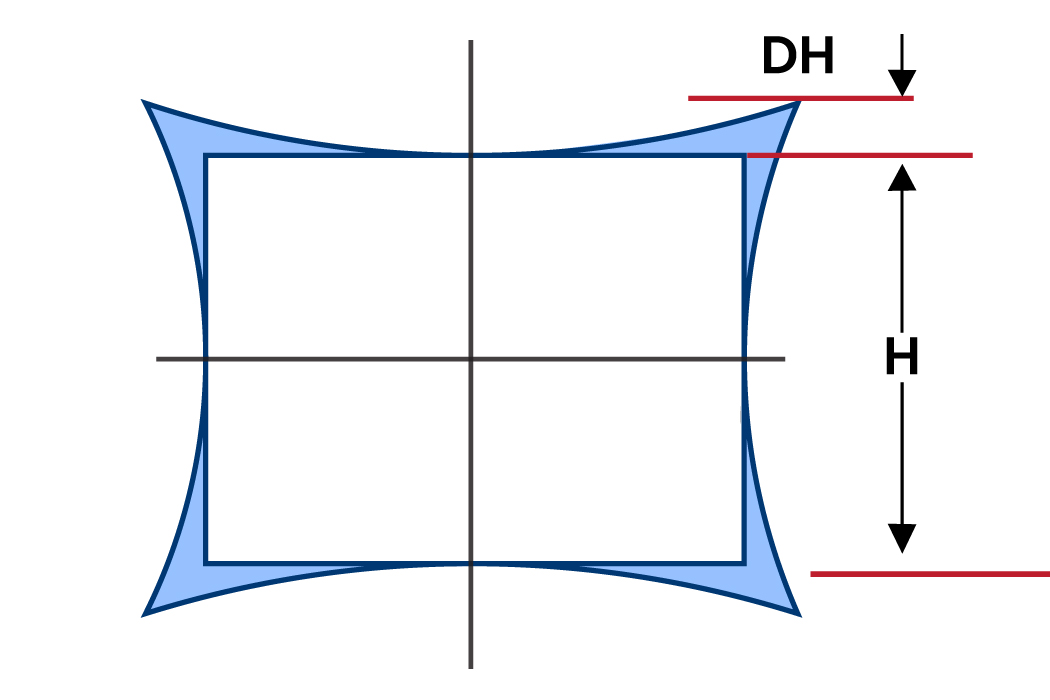 Figure 2: TV Distortion – Pincushion
Figure 2: TV Distortion – Pincushion
Explore e-con Systems’ OEM Cameras Suitable for Your Embedded Vision Application
e-con Systems is an industry pioneer with 20+ years of experience designing, developing, and manufacturing OEM cameras.
We recognize embedded vision application’s camera requirements and build our cameras to best suit the industry demands.
We also provide various customization services, including camera enclosures, resolution, frame rate, and sensors of your choice, to ensure our cameras fit perfectly into your embedded vision applications.
Visit e-con Systems Camera Selector Page to explore our wide range of cameras.
For queries, email us at camerasolutions@e-consystems.com.

Prabu is the Chief Technology Officer and Head of Camera Products at e-con Systems, and comes with a rich experience of more than 15 years in the embedded vision space. He brings to the table a deep knowledge in USB cameras, embedded vision cameras, vision algorithms and FPGAs. He has built 50+ camera solutions spanning various domains such as medical, industrial, agriculture, retail, biometrics, and more. He also comes with expertise in device driver development and BSP development. Currently, Prabu’s focus is to build smart camera solutions that power new age AI based applications.