


In this blog, you’ll get to know
- What the Dust Denoising Filter is
- How the filter removes dust-induced noise artifacts
- Why is it better than traditional filtering methods
- Key benefits & real-world applications
Too Much Dust: Challenges Faced By ToF Cameras
ToF cameras operate using infrared (IR) light, which scatters dust particles in the environment, producing bright spots in the captured IR image. Since this IR data is critical for depth estimation, the interference causes:
- False depth values in pixels
- Actual objects are being masked due to blind regions
- Unreliable performance in applications like AMR navigation or medical imaging
Existing methods address this problem by using temporal filters that average multiple frames. However, these approaches often fall short because they introduce motion artifacts when objects or the camera are moving and fail to effectively remove dust noise.
To overcome these challenges, e-con Systems developed a proprietary Dust Denoising Filter for ToF cameras. This solution ensures clean, denoised depth images, enabling vision applications to function reliably even in dusty environments.
What Is the Dust Denoising Filter? And Why It Was Developed
A Dust Denoising Filter is an algorithm or a set of computational steps specifically designed to filter out noise caused by dust particles in the depth data captured by a ToF sensor in the camera.
Unlike traditional filters, this filter is proposed for the dust-related artifacts. The depth map may show “noise” due to inaccurate distance estimates caused by dust particles floating in the air, which reflect light back to the camera. The responsibility of the dust filter is to find and correct these unusual readings by substituting more realistic depth values.
The diagram below further explains the Denoising Filter.
To know about the Time-of-flight camera vs other 3D Imaging Technologies, please read Time-of-Flight (ToF) Cameras vs. other 3D Depth Mapping Cameras – e-con Systems
Dust Denoising Filter vs. Traditional Methods
Traditional filters, such as simple averages or temporal filters, are inefficient for noise artifacts for several reasons, including susceptibility to motion artifacts and inadequate noise filtering.
The Denoising Filter identifies dust and doesn’t simply delete it. By targeting only dust characteristics, the filter can be more precise, preserving the scene’s true details while effectively removing noise. This allows for a much cleaner and more accurate depth output.
The GIF below shows the filter working in dynamic conditions. Even when the scene contains motion, the Dust Denoising Filter removes dust artifacts without introducing motion blur or distortion.
How the Dust Denoising Filter Works?
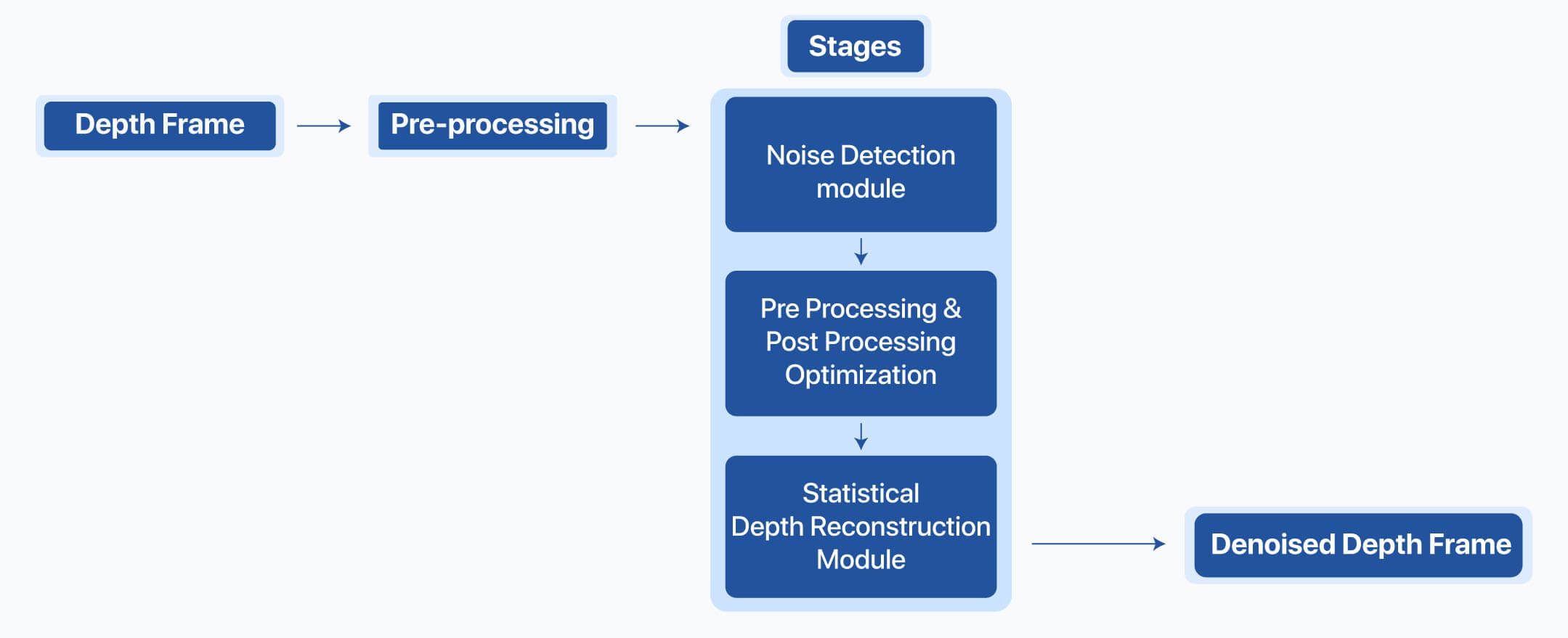
The main goal of our Dust Denoising Filter is to improve the accuracy of a ToF camera’s depth output by removing dust-induced noise. It does this by a multi-stage process that combines AI-based detection with statistical reconstruction to deliver denoised depth frames.
Let’s see each stage of the process in detail in the sections below:
Stage 1: Intelligent noise detection module
Primary detection layer: A noise artifact detection algorithm can use any advanced artificial intelligence algorithm, such as a Deep Neural Network (DNN) for complex pattern recognition, a Convolutional Neural Network (CNN) for spatial feature extraction, a Restricted Boltzmann Machine (RBM), a Deep Belief Network (DBN) for hierarchical feature learning, and Deep Q-Networks based on requirements.
The AI model trains the Denoising Filter using a dataset comprising infrared images, depth frames with varying levels of noise, and grayscale images captured under various environmental conditions, to identify irregularities in the depth frames and output noise-affected regions precisely.
Secondary verification layer: A noise-artifact identification algorithm analyzes detected regions for contextual factors, such as shape, size, and temporal behavior patterns.
Stage 2: Pre-processing and post-processing optimization
Pre-processing module: It enhances the quality of incoming depth frames through noise reduction and smart image resizing, preparing the data optimally for further AI analysis.
Post-processing module: Selective noise verification and reconstruction are performed using the AI model’s bounding box coordinates in statistical temporal correction.
Stage 3: Statistical depth reconstruction module
By confirming the regions that might be affected by noise, the reconstruction subsystem approaches a particular region to preserve scene dynamics while correcting corrupted data by:
Temporal data integration: The filter analyzes consecutive depth frames, extracting temporal patterns that will allow it to discriminate between persistent noise artifacts and legitimate scene changes.
Statistical reconstruction algorithm: An advanced algorithm applies different threshold levels based on the confidence values of the AI detection model to ensure that the reconstruction parameters match the characteristics of the detected artifacts.
Motion artifact elimination: The system prevents the distorting effects of motion by only conducting the reconstruction operations on those regions identified as noise rather than operating on whole frames.
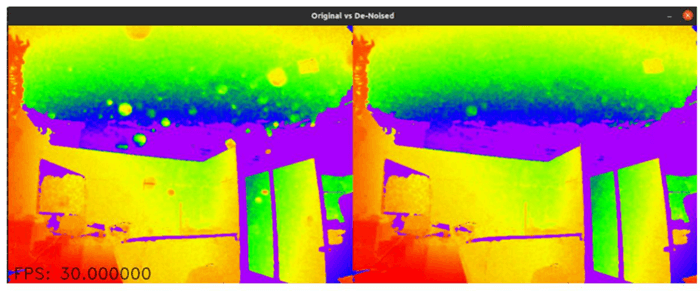
In our 3D Time of Flight (ToF) USB Camera with an accuracy of <1%, the Denoising Filter removes noise artifacts. We can see that the dust pixel has been significantly filtered.
Key Benefits of Dust Denoising Filter
- Prevent motion blur in dynamic scenes
- Targeted correction instead of full-frame filtering
- Works in both high and low dust environments
- Enhances 3D reconstruction and point cloud reliability
- Plug-and-play via DepthVista SDK
To learn more about the integration of DepthVista (TOF Camera) SDK on a Jetson board, please read this article How to deploy the DepthVista (TOF Camera) SDK for Isaac SDK 2021.1 on a Jetson board – e-con Systems.
How Dust Denoising Enhances Real-World Applications
Autonomous Mobile Robots (AMRs)
In warehouses, factories, and logistics centers, dust is often unavoidable and can corrupt ToF depth frames, leading to false readings. Without correction, this can lead to navigation errors or downtime.
The use of an artificial intelligence model minimizes false positives, ensuring precise detection and removal of noise-affected regions, enabling AMRs to operate continuously, avoid collisions, and navigate reliably even in dusty or harsh industrial conditions.
Autonomous vehicles
In autonomous driving and advanced driver-assistance systems (ADAS), ToF cameras are used for near-field sensing and environment perception. Environmental dust, fog, or smoke can introduce blind regions in the depth map, which compromise safety-critical decisions.
By applying AI-based detection and region-specific reconstruction, the Dust Noise Filter delivers denoised depth frames that enable autonomous vehicles to detect obstacles more precisely, maintain reliable perception in challenging weather conditions, and enhance passenger safety.
Leverage the Dust Denoising Filter with e-con Systems’ ToF Cameras
e-con Systems has been building embedded vision solutions since 2003. With strong expertise in 3D imaging, our ToF camera lineup continues to evolve with advanced capabilities—including the proprietary Dust Denoising Filter.
The dust denoising filter will be available as a module within the DepthVista SDK.
Explore our Camera Selector – find your cameras quick and easy!
For guidance, contact us at camerasolutions@e-consystems.com.
FAQS
- What Is the Dust Denoising Filter?
The Dust Denoising Filter is an algorithm or a set of computational steps specifically designed to filter out noise caused by dust particles in the depth data captured by a ToF camera.
- How does the Dust Denoising Filter differentiate between dust particles and small real-world objects?
The filter uses a dual-layer approach: an AI-based detection model identifies noise regions, and a secondary verification algorithm evaluates contextual factors such as shape, size, and temporal consistency. This minimizes false positives by distinguishing dust artifacts from valid small objects like fingers, tools, or machine parts.
- Can the Dust Denoising Filter adapt to different environmental conditions?
The AI model is trained on diverse datasets that include infrared images, grayscale frames, and depth maps captured under varying dust levels and lighting conditions. It can be retrained or fine-tuned with application-specific datasets, making it adaptable to diverse environments.
- Can this filter enhance point cloud data in addition to depth maps?
Since ToF depth maps are often converted into 3D point clouds, denoised frames directly improve the quality of the point clouds. This results in more reliable 3D perception, which is particularly beneficial for LiDAR fusion, SLAM (Simultaneous Localization and Mapping), and advanced robotic vision tasks.

Prabu is the Chief Technology Officer and Head of Camera Products at e-con Systems, and comes with a rich experience of more than 15 years in the embedded vision space. He brings to the table a deep knowledge in USB cameras, embedded vision cameras, vision algorithms and FPGAs. He has built 50+ camera solutions spanning various domains such as medical, industrial, agriculture, retail, biometrics, and more. He also comes with expertise in device driver development and BSP development. Currently, Prabu’s focus is to build smart camera solutions that power new age AI based applications.