

Lane violations contribute to a high percentage of road accidents and traffic bottlenecks, especially in metro corridors and highways. Enforcing discipline across multiple lanes has become an infrastructure priority, but conventional methods often involve multiple cameras or lane-by-lane sensors, increasing complexity and cost.
Today, it is possible to monitor multi-lane segments using a single camera when backed by careful planning, smart positioning, and the right imaging design.
In this blog, you’ll learn how cameras enable multi-lane violation detection, what imaging features matter most, and where single-camera setups work best.
Why Cameras Are Used for Lane Violation Detection
Cameras provide visual evidence in real time, identifying when a vehicle has crossed a lane boundary, along with when, how, and in what context. Unlike ground sensors that detect motion but lack visual context, imaging systems capture spatial relationships between vehicles and lane markings.
Cameras are also easier to deploy on poles or gantries, avoiding road closures or invasive surface work. In variable traffic conditions, they can support dynamic rules such as peak-hour lane restrictions, bus-only lanes, or emergency shoulder access, making them suitable for both permanent enforcement and temporary monitoring.
How Multi-Lane Coverage Works in Lane Violation Detection
A single camera can monitor three or more lanes depending on installation height, lens field of view (FOV), and sensor resolution.
Here’s how the process unfolds:
- Elevated mounting provides a wider road perspective. Carefully selected wide or moderate-FOV lenses capture multiple lanes within one frame, while sufficient sensor resolution ensures lane markings and vehicle boundaries remain distinct.
- Typically installed at heights of 6–12 meters on poles or gantries, a single camera can monitor 3–5 lanes, depending on lens field of view, lane width, and road geometry.
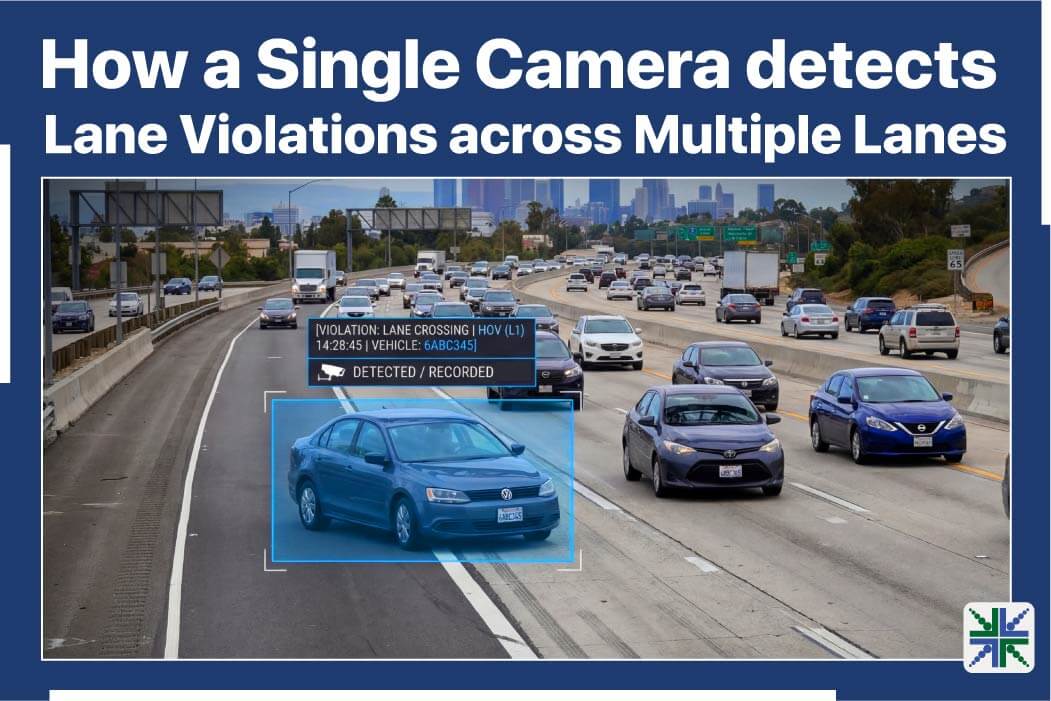
- The video feed is divided into software-defined lane zones aligned with physical lane geometry. Vehicles are tracked across these zones, and boundary crossings or illegal lane changes are flagged as potential violations.
- Instead of relying on single frames, the system evaluates vehicle movement over multiple frames, reducing false detections caused by momentary drift, shadows, reflections, or partial occlusions.
Key Camera Features That Enable Multi-Lane Violation Detection
Global shutter
Fast-moving vehicles can appear distorted with rolling shutter sensors, leading to incorrect lane alignment or tracking errors. A global shutter exposes all pixels simultaneously, preserving geometry across the frame, which is critical when vehicles change lanes or accelerate abruptly. This distortion can cause lane lines and vehicle edges to skew during lateral motion, resulting in false lane-boundary crossings or missed violations.
High frame rate
In traffic scenarios where multiple vehicles occupy adjacent lanes, subtle lane shifts can happen in milliseconds. Cameras operating at 30–60 frames per second are commonly used, with higher frame rates improving robustness in dense traffic or high-speed corridors. Higher frame rates reduce temporal gaps between frames, making it easier to track vehicles through each stage of a lane change.
Missed frames can result in misclassification or unregistered violations. Furthermore, a high frame rate enables smoother data flow for real-time alert systems that depend on near-instantaneous feedback from the camera feed.
Wide Dynamic Range (WDR)
Road environments present a highly dynamic lighting mix, from glare from windshields and deep shadows to bright skies. A camera equipped with WDR can process scenes containing both very dark and very bright regions without losing detail in either.
In practical terms, this means lane lines painted on sunlit roads remain visible even if part of the frame is in shadow. It also prevents overexposure that could cause a vehicle’s body to blend with the background.
High resolution
Multi-lane coverage compresses a lot of visual information into a single frame. If the sensor resolution is too low, lane lines become blurred, vehicle boundaries overlap, and smaller objects disappear into pixel noise. A high-resolution sensor (typically 2MP–8MP depending on lane width and coverage) preserves image clarity across the frame.
It enables clear differentiation between adjacent lanes and supports the creation of accurate software-defined zones. Each lane remains distinct, and the system can confidently assign vehicles to their correct positions without interpolation. In enforcement applications, what ultimately matters are pixel density per lane (pixels per meter) rather than just megapixel count. Adequate pixel density ensures vehicles remain distinguishable even when multiple lanes share the same frame.
Lens Field of View (FOV) selection
Lens choice directly affects performance because:
- Wider FOV lenses enable coverage of more lanes but reduce pixel density per lane.
- Moderate FOV lenses improve lane-level accuracy but may limit lane count.
Therefore, selecting the right FOV is a balance between lane coverage, mounting height, and required detection accuracy.
High-bandwidth interface
A camera capturing high-resolution frames at elevated frame rates generates substantial data every second. Without a high-bandwidth interface, this data would bottleneck before reaching the processing unit, leading to dropped frames or delayed analysis. Interfaces such as Gigabit Ethernet (GigE), GMSL, MIPI and USB 3.1 can transmit uncompressed video streams with low latency.
This real-time feed is important for analytics systems that rely on frame-by-frame tracking. After all, in traffic enforcement applications, even a second’s delay could mean missing a lane departure event.
Low-light performance
Nighttime visibility is a major challenge on roads without uniform street lighting or in tunnel environments. Cameras that perform well in low-light conditions use sensors with enhanced sensitivity and noise-reduction capabilities. In addition, support for near-infrared (NIR) wavelengths enables operation with infrared illumination, allowing monitoring even in near-total darkness.
When paired with IR illuminators, the camera can capture high-contrast footage of lane lines and moving vehicles, even in the absence of natural or artificial light. It ensures that lane violation monitoring remains active and dependable around the clock, regardless of lighting conditions.
Common Use Cases for Single-Camera Lane Violation Detection
Single-camera setups are widely used for:
- Bus-lane enforcement
- Solid-line and shoulder misuse detection
- Peak-hour lane restriction monitoring
- Temporary enforcement on straight road segments
- HOV/HOT lane compliance monitoring
- Dynamic lane management (reversible lanes, emergency shoulders)
Vision-Based Considerations for Practical Deployment
- Lane marking quality matters: Faded, temporary, or inconsistent markings can affect detection reliability. Software-defined zones and periodic recalibration help maintain accuracy.
- Calibration and re-alignment: Initial lane calibration is required, and recalibration may be needed after camera movement, road resurfacing, or lane re-striping.
- Single-camera limits: Single-camera setups work best on straight road segments with consistent markings. Complex junctions, sharp curves, frequent merges, or heavy occlusion zones often exceed the practical limits of a single camera and may require multi-camera architectures.
e-con Systems’ Single-Camera Solutions for Lane Detection System
Since 2003, e-con Systems has been designing, developing, and manufacturing embedded vision solutions – from custom OEM cameras to complete ODM platforms. We offer high-performance camera solutions that are perfect for smart traffic systems, including those that perform lane detection tasks.
Browse our Camera Selector Page to check out our end-to-end portfolio.
Explore our traffic management expertise.
If you need help to select and integrate the right camera into your embedded vision system, please write to camerasolutions@e-consystems.com.
FAQs
- Can one camera really monitor multiple lanes for lane violation detection?
Yes. A single camera can cover three to five lanes when mounting height, lens field of view, sensor resolution, and road geometry are aligned properly. The video feed is then mapped into software-defined lane zones so vehicles can be tracked as they move from one lane to another.
- Which camera features matter most for multi-lane violation detection?
The main features include global shutter, high frame rate, WDR, high resolution, the right lens field of view, a high-bandwidth interface, and good low-light performance. Together, these features help preserve vehicle shape, capture fast lane shifts, handle glare and shadows, and keep lane markings visible during day and night operation.
- Why is global shutter useful in lane violation systems?
Global shutter captures the full frame at the same time, which helps keep vehicle edges and lane markings aligned even during fast motion. That matters when vehicles change lanes quickly, because image distortion can lead to tracking errors or false lane-crossing events.
- Where does a single-camera setup work best?
Single-camera systems work best on straight road segments with consistent lane markings. Common examples include bus-lane enforcement, shoulder misuse detection, peak-hour lane restriction monitoring, and temporary deployment on roads where a wide field of view can cover the full target area.
- What can affect detection quality in real-world deployment?
Lane marking quality, camera calibration, road resurfacing, lane re-striping, sharp curves, merges, and heavy occlusion can all impact performance. In simpler road layouts, one camera can do the job well. In more complex traffic scenes, teams may need a multi-camera setup for better coverage and tracking consistency.
- How does an AI-based lane violation detection system work?
AI-based lane violation detection systems analyze video streams from traffic cameras to detect vehicle movement relative to lane boundaries. Computer vision algorithms detect lane markings, track vehicles across multiple frames, and determine when a vehicle crosses restricted lane boundaries. When a violation is detected, the system records the event and stores visual evidence for traffic enforcement or analytics.

Dilip Kumar is a computer vision solutions architect having more than 8 years of experience in camera solutions development & edge computing. He has spearheaded research & development of computer vision & AI products for the currently nascent edge AI industry. He has been at the forefront of building multiple vision based products using embedded SoCs for industrial use cases such as Autonomous Mobile Robots, AI based video analytics systems, Drone based inspection & surveillance systems.