


“Does your camera support Robot Operating Systems?”
“How do I use your camera with ROS?
“Can you provide any sample applications to use your camera with ROS?”
These are some of the queries we have been receiving from eager clients, who are looking to harness the power of commercial robots. We always answer each one with the affirmation that all e-con Systems™ cameras are “Video for Linux 2 (V4L2)” compliant. It means they can be used with any application supporting this protocol.
Before we tell you more about it, let’s look at how ROS can be a transformative force for your vision-powered needs.
About ROS
Robot Operating System (ROS) is a set of software frameworks that are geared for robot development. It offers a package management toolset who contains specific packages that are required in a robot’s design. For instance, a robot which uses a camera for running vision algorithms can include packages specific to OpenCV, whereas a stationary robot that helps in lifting heavy objects may include packages specific to servo control.
To simplify your experience of testing our cameras in ROS, e-con Systems™ has created a sample application – rqt_cam
About rqt_cam application
e-con Systems™ has developed this Open Source sample application based on V4L2. The rqt_cam application is a V4L2 video viewing and capturing software to demonstrate the features of e-con Systems™ cameras. It can be used for e-con System’s – USB based See3CAM series of cameras and our platform cameras for Jetson Xavier, TX2 and Nano.
Github link for the sample application: https://github.com/econsystems/rqt_cam
Build and Installation guide along with the Application User Manual are provided in the Github.
The application can support basic features such as:
- Enumerating and listing all the video devices connected
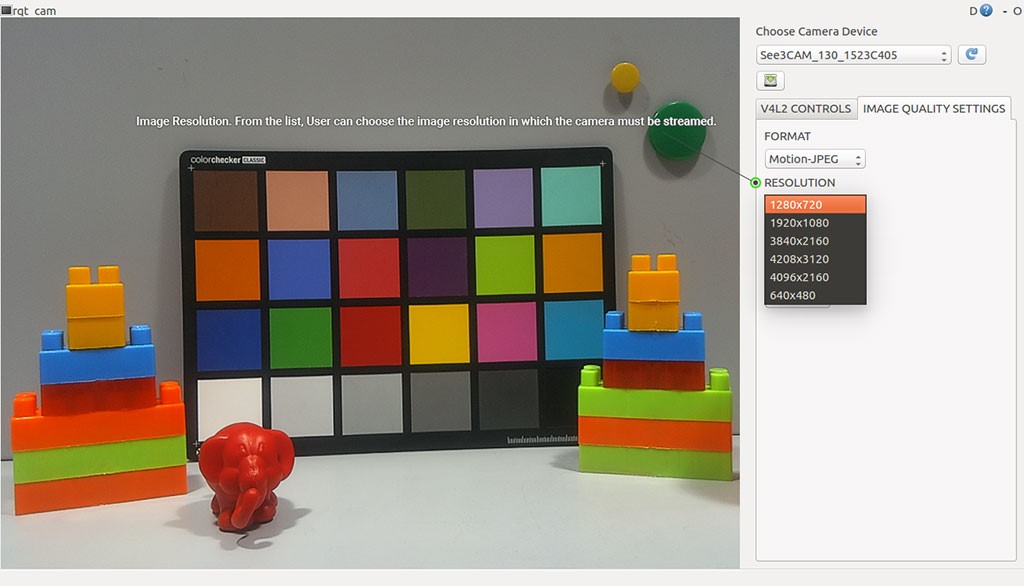
- Changing color space/compression, resolution and frame rate for video stream, which are supported by the camera
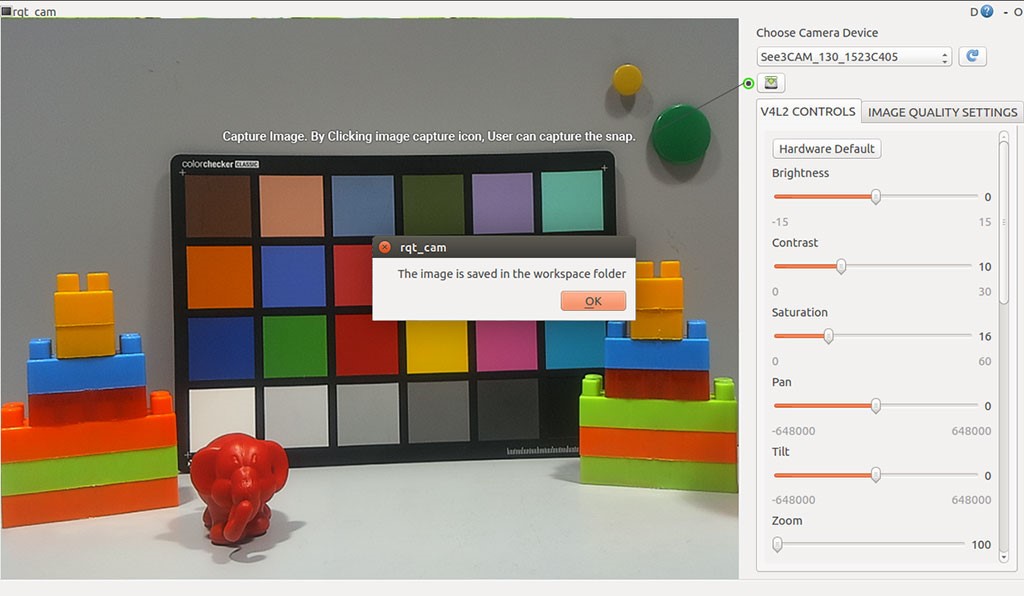
- Capturing the still images and set the path where still images will be saved
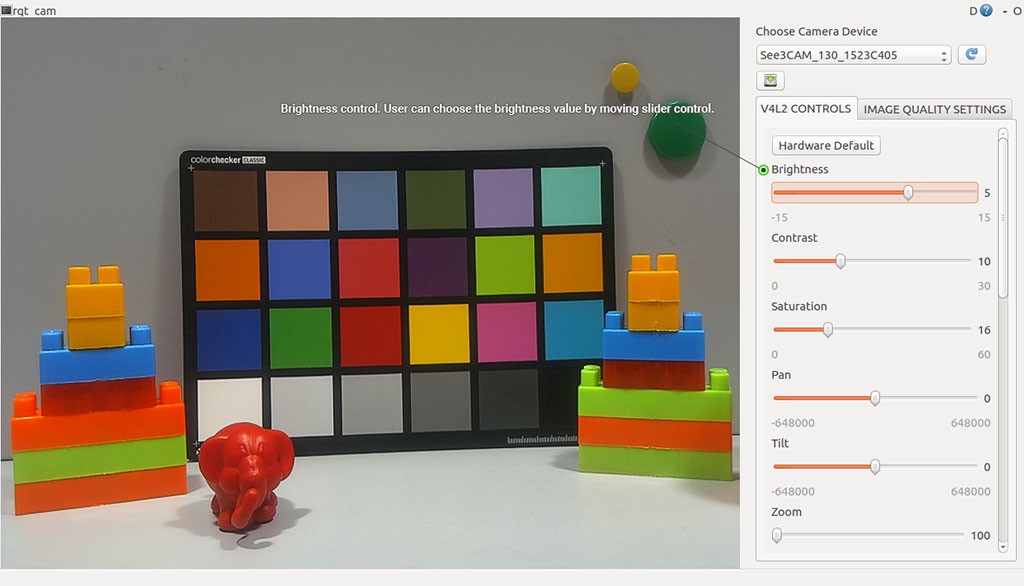
- Configuring V4l2 controls supported by the camera
The rqt_cam application supports both the ROS Kinetic (Ubuntu 16.04) and ROS Melodic (Ubuntu 18.04) distributions.
For more information, please contact sales@e-consystems.com

Ram Prasad is a Camera Solution Architect with over 12 years of experience in embedded product development, technical architecture, and delivering vision-based solution. He has been instrumental in enabling 100+ customers across diverse industries to integrate the right imaging technologies into their products. His expertise spans a wide range of applications, including smart surveillance, precision agriculture, industrial automation, and mobility solutions. Ram’s deep understanding of embedded vision systems has helped companies accelerate innovation and build reliable, future-ready products.