


広角写真の端のほうで直線が曲がって見えることに気づいたことがありますか?それがレンズの歪みの影響です!歪みは、形成された画像内の光の外観に主に影響を与える収差の一種です。
収差とは、期待される光の挙動(期待される光の挙動:光線は理想的にはセンサーの一点に収束し、シャープな画像を形成する)から逸脱した光の挙動のことです。収差は、レンズが光線を集束させる方法に欠陥があるために起こり、その結果、画像が歪曲(歪み)します。
歪曲収差は、他の収差と比較して、それほど多くの情報損失を引き起こしません。主に画像の外観にのみ影響を与えるため、歪曲収差はしばしば「外観上の収差」と呼ばれます。情報の損失がないため、数学的な方法で、補正することができます。
このブログでは、歪みの原因、歪みの種類、そして波長や視野角(FOV)などの要素との関係について詳しく説明します。
歪みはどのようにして起こるのか?
歪みを理解するためには、屈折のプロセスを理解する必要があります。屈折とは、光が異なる媒質を通過する際にその速度が変化し、その結果光が曲がる現象です。例えば、光は空気からガラスに入るときに曲がります。屈折角(光が新しい媒質内で進む角度)は、光が通過する媒質の屈折率に依存します。
歪みは、この屈折によって発生します。つまり、光がレンズを通過するときに光の進む方向が変わるため、歪みが生じるのです。
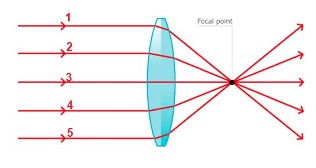
図1:光の屈折
屈折は、カメラで撮影した画像における歪みの原因です。光線がレンズを通過する際、その進行方向は屈折によって異なります。
図1では、光線がレンズを通過する際に屈折を受けている様子が示されています。レンズは光線を「焦点」と呼ばれる一点に収束させようとします。ここで、レンズの中心を通過する光線「3」を見ると、ほとんど屈折が起こらないことが分かります。一方、レンズの端を通過する光線「1」や「5」は、最大の屈折を受けていることが分かります。
このことから、光線がレンズを通過する際の進行経路やレンズ上のどの点を通るかによって、屈折の度合いが異なることが分かります。この現象により、予想される焦点に収束すべき詳細な情報が、別の点に収束してしまうことがあります(図2を参照)。
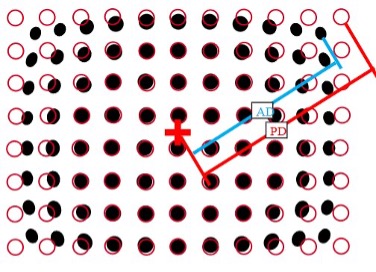 図2: 画像の隅における歪み
図2: 画像の隅における歪み
上記の図から、画像の隅において、赤い円内に収束すべき黒い点がずれているのが確認できます。一方、画像の中央部分では、黒い点は正しい位置に収束しており、ずれていません。
これは、レンズの中心から隅に向かうにつれて、通過する光線がより多くの歪みを受けるためです。そのため、中央部分では画像のずれはなく、隅や端に行くほど歪みが感じられるのです。
歪みとその他の収差について
上記の情報から、歪みとは単なる幾何学的な収差であり、詳細が予想される位置から他の場所にずれてしまう現象であると推測できます。歪みは情報のずれであって、情報自体が失われているわけではないため、修正が可能です。歪んだ部分は、数学的な方法を用いてマッピングし、取り除くことができます。一方で、色収差などの他の収差では、情報が失われており、それを再現することはできません。
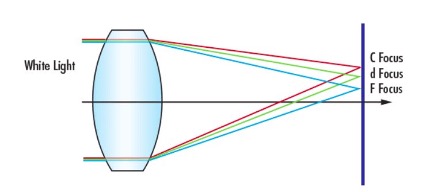 図3:横方向の色収差
図3:横方向の色収差
図3は横方向の色収差を示しています。この図では、すべての光線が「F焦点」に集められるべきですが、緑色と赤色の波長を持つ光線がずれていることがわかります。
緑色の光の投影されたピクセルには、すでに独自のピクセルデータがあります。緑色の光が誤って同じピクセルに当たった場合、その場所の既存のデータは変更されます。その結果、これらのピクセルをサンプリングすると、歪んだ不正確な画像が得られます。この種類の歪みは、誤って配置された強度をピクセルから単純に減算することはできないため、修正できません。強度は、シーン、色、カメラとオブジェクト間の距離など、多くの要因の影響を受けます。したがって、色収差を修正するために除去する強度の正確な量を決定することは不可能です。
一方で、歪み収差の場合、ずれた距離(図2を参照)を計算し、それをマッピングして歪みを取り除くことができます。それでも、すべての歪みを画像から取り除くことはできません。
歪みにおける情報の喪失
レンズの広いFOV(視野角)によって歪みが発生すると、特定のピクセルが広範囲の領域と収束してしまい、その結果として情報が失われることがあります。これを次の例で詳しく見てみましょう(図4を参照)。
図4において、「A」は理想的なケースを表し、黒いラインの領域は、図中でP1、2、3とマークされた3つのピクセルでサンプリングされます。白いラインの領域は、図中で4, 5, 6とマークされた別の3つのピクセルでサンプリングされます。歪みのために、これらのピクセル値が画像の他の領域、例えば黒と白のラインの次の行に間違って配置されている場合は、数学的方法を使用し、それをマップして修正することができます。
図4の「B」は、歪みを修正できず、情報が失われるシナリオを表しています。ピクセルP1が非常に広い領域をサンプリングしていることがわかります。ここでのP1ピクセルは、白のライン領域と黒のライン領域の両方をサンプリングします。ピクセルの最終サンプルの色はグレーになります。このように、ピクセルは撮影されるシーンに実際に捉えられていない誤った情報を表すことになります。この種の歪みは数学的手法では修正されません。
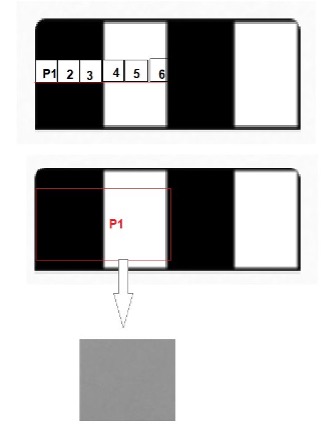 図4:歪みによる情報の喪失
図4:歪みによる情報の喪失
歪みと波長
歪みは通常、単色的な現象として認識されます。けれども、歪みは光の波長によっても異なります。光の屈折の大きさは波長によって異なり、歪みは主に屈折によって引き起こされるため、歪みも光の波長に依存します。
異なる波長の光によって引き起こされる歪みの違いは、ずれの大きさとして表現されます。
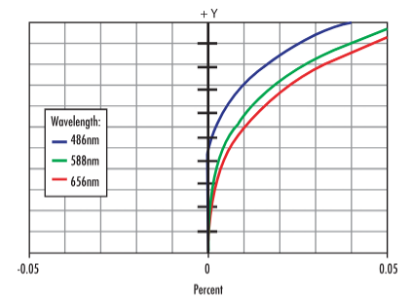 図5:光の波長による歪み
図5:光の波長による歪み
歪みと視野角(FOV)
カメラのレンズは、凸レンズ、凹レンズ、平面レンズなど、さまざまな種類のレンズで構成された複合レンズシステムです。これらのレンズの最終的な目的は、入射する光線を1つの焦点に収束させることです。そのため、レンズの中心から端に向かうにつれて歪みの大きさが増します。これは、レンズの端では屈折が大きく、レンズがより曲率を持ち、光線の入射角も高くなるためです。この結果、画像の四隅ではより多くの歪みが生じます。
歪みが隅に向かって増加する割合は、立方体の視野に依存します。つまり、歪みの増加率は立方体の範囲で変化します。
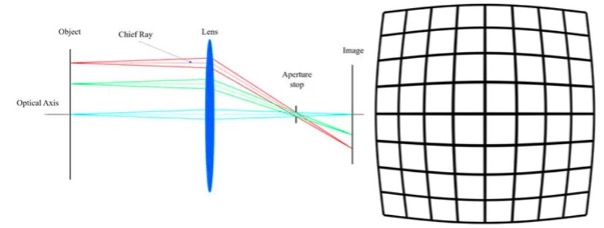 図 5: 立方体フィールドによる歪みの表現
図 5: 立方体フィールドによる歪みの表現
歪みの種類
- 樽型歪み: 樽型歪みでは、直線が外側に曲がって樽のように見えます。これは通常、広角レンズを使用した場合に発生します。広角レンズでは、フレームの端からの光線が中央からの光線よりも大きく屈折します。
 図6:樽型歪み
図6:樽型歪み
- ピンクッション型歪み: このタイプの歪みでは、直線が内向きに曲がって見え、ピンクッション(針山)の形に似ています。これは、望遠レンズでよく発生し、フレームの中心からの光線が端からの光線よりも多く屈折するためです。

図7:ピンクッション型歪み
- キーストーン型歪み: キーストーン型歪みは、カメラのセンサープレーンが撮影対象に対して平行でない場合に発生し、画像内で垂直線が収束したり、逆に拡散したりする現象です。
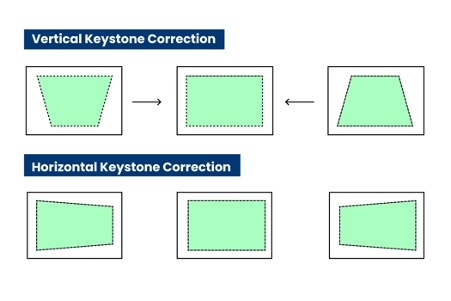
図8:キーストーン型歪み
- 口ひげ型歪み: 口ひげ型歪みは、樽型歪みとピンクッション型歪みの組み合わせで、直線の異なる部分で内向きおよび外向きの曲がりが見られるのが特徴です。この歪みは、特に複雑なレンズ設計、特に広角レンズにおいてよく発生します。
レンズ歪みの補正
レンズの歪みは、光線の進行経路を調整することで制御できます。追加のレンズ要素を導入し、それらを適切に配置することで、歪みをある程度制御することが可能です。しかし、この方法はレンズシステムの設計を複雑にし、内部反射が増加する可能性があり、その結果、画像にフレア(逆光)が発生することがあります(図9を参照)。
図9では、両方のレンズが同じ視野角を持っていることがわかります。最初の画像は歪みが大きいですが、2番目の画像では歪みが減少しています。しかし、システムに追加のレンズが含まれるため、内部反射が発生し、その結果として画像にフレアが生じています。
 図9:歪み補正によって引き起こされたレンズフレア
図9:歪み補正によって引き起こされたレンズフレア
e-con Systemsのカメラで画像アーティファクトに対処
e-con Systemsは、OEMカメラの設計、開発、製造において20年以上の経験を持つ業界の先駆者です。
当社のカメラは、実際のアプリケーションを考慮して設計されており、あらゆる種類の画像アーティファクトに対応します。高品質な出力画像を提供するために、精密に調整されたISP(イメージシグナルプロセッサ)を搭載しています。
e-con Systemsは、カメラのエンクロージャ、解像度、フレームレート、センサーなど、お客様のご要望に合わせたカスタマイズサービスも提供しており、組み込みビジョンアプリケーションにフィットするカメラをお届けします。
当社のカメラの詳細については、e-con Systemsのカメラセレクターページをご覧ください。
ご質問や詳細については、camerasolutions@e-consystems.comまでメールでお問い合わせください。
よくある質問 (FAQ)
- 人間の目には歪みがありますか?
はい、人間の目にはわずかな歪みが存在します!目の形が曲がっていたり、密度が均一でなかったりすることで、網膜に歪んだ像が映ります。しかし、私たちの脳はこの歪みを巧みに補正し、世界を鮮明に見ることができるようにしています。
- 焦点距離は歪みにどのように影響しますか?
広角レンズ(焦点距離が短い)は歪みを強調し、直線を外側に曲げること(バレル歪み)があります。一方、望遠レンズ(焦点距離が長い)は歪みが少なく、遠くの物体を圧縮して、距離が近く見えるようにすることがあります。

Prabu Kumarは、e-con Systemsの最高技術責任者兼カメラ製品責任者であり、組み込みビジョン分野で15年以上の豊富な経験があります。彼は、USBカメラ、組み込みビジョンカメラ、ビジョンアルゴリズム、FPGAに関する深い知識をも有しています。医療、工業、農業、小売、生体認証などのさまざまなドメインにまたがる50以上のカメラソリューションを構築してきました。また、デバイスドライバー開発とBSP開発の専門家でもあります。現在は、新時代のAIベースのアプリケーションを強化するスマートカメラソリューションの構築に全力を注いでいます。